D 域划分(卷名:自动控制与系统工程)
D-division
按照系统特征方程的负实部根的数目,把由系统待定参数所导出的一个复数平面划分为对应的一些区域的方法。在提出这一方法时,采用Д(i)(在英文中即为D(i))来命名由此得到的每一个区域,i表示待定参数取值于该区域时系统特征方程的负实部根的数目。D域划分因此得名。其中,区域D(n)对应于系统特征方程的全部n个根均具有负实部的参数域,也即保证系统稳定的参数域。因此,D域划分的方法可用于确定使系统稳定(见稳定性)的待定参数的取值范围,以便合理地选择控制系统的关键参数(如增益)的数值。D域划分的概念是苏联学者Ю.И.奈马克于1948年首先提出的,通常只适用于线性定常系统。对于只包含一个待定参数的系统,D域划分图可根据系统的特征方程方便地定出。系统的特征方程是传递函数的分母多项式为零的一个代数方程。用μ表示待定参数,并且把特征方程表示成对μ的显式
 式中P(s)和Q(s)均是系数为已知的、复变量 s的多项式。如果在这多项式中复变量s取值为纯虚数jω,则由关系式
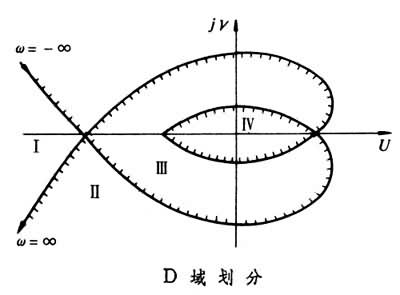
式中P(s)和Q(s)均是系数为已知的、复变量 s的多项式。如果在这多项式中复变量s取值为纯虚数jω,则由关系式 可在以j V为纵轴和以U为横轴的复数平面上,作出待定参数μ随参变量ω由-∞变化到+∞的曲线(见图)。如果沿ω增加的方向在曲线的左侧画上阴影线,便得到系统的D域划分图。在D域划分图上,清晰地将待定参数μ相应的复数平面划分成若干个分开的区域(图中用Ⅰ、Ⅱ、Ⅲ、Ⅳ标出),而且有阴影线的内域一定比相邻的外域多一个负实部的根。对于图中的例子,如果域Ⅰ中的参数对应于特征方程有 m个负实部的根就将此域记为D(m),那么域Ⅱ应记为D(m +1),域Ⅲ对应于D(m +2),域Ⅳ对应于D(m +3)。D域划分的方法原则上也适用于具有多个待定参数的系统,但实际上当待定参数超过两个时就已很难使用。
可在以j V为纵轴和以U为横轴的复数平面上,作出待定参数μ随参变量ω由-∞变化到+∞的曲线(见图)。如果沿ω增加的方向在曲线的左侧画上阴影线,便得到系统的D域划分图。在D域划分图上,清晰地将待定参数μ相应的复数平面划分成若干个分开的区域(图中用Ⅰ、Ⅱ、Ⅲ、Ⅳ标出),而且有阴影线的内域一定比相邻的外域多一个负实部的根。对于图中的例子,如果域Ⅰ中的参数对应于特征方程有 m个负实部的根就将此域记为D(m),那么域Ⅱ应记为D(m +1),域Ⅲ对应于D(m +2),域Ⅳ对应于D(m +3)。D域划分的方法原则上也适用于具有多个待定参数的系统,但实际上当待定参数超过两个时就已很难使用。