惯性测量系统(卷名:固体地球物理学 测绘学 空间科学)
inertial surveying system
利用陀螺仪、加速度计等惯性敏感元件和电子计算机,实时测量运载体相对于地面运动的加速度,以确定运载体的位置和地球重力场参数的组合仪器。这种系统是在惯性导航系统的基础上发展起来的,按所采用的导航坐标系统分为两大类:当地水平惯性系统和空间稳定系统。一般多采用第一类的当地水平指北惯性系统。
组成 整个系统安装在运载体(汽车或直升飞机)上,主要包括惯性测量装置(其核心为加速度计、陀螺仪和万向支架)、电子计算机、控制显示器、数据存储记录器和电源(见图)。
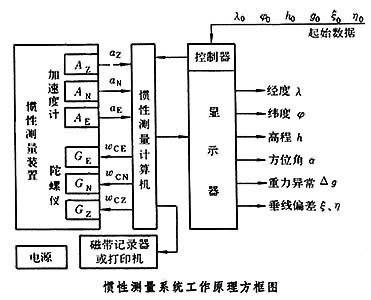
测量的基本原理 以当地水平指北系统为例,在陀螺仪GE、GN、GZ和电子计算机控制下,惯性平台始终保持地平坐标系,安装在平台上的3个互相正交的加速度计AE、AN、AZ,分别测出沿东西、南北和垂直方向的加速度分量ɑE、ɑN、ɑZ,并输入计算机。在消除加速度计误差、重力加速度和由于地球自转产生的科里奥利加速度影响后,得出运载体相对地平坐标系的位移加速度分量,再就t(从起始点到待测点的时间)进行两次积分,并考虑初始速度值v 0N、v 0E、v0Z,就可解算出相对前一起始点的坐标变化量,同相应起始点的经度λ0、纬度嗘0和高程h0累加,就得到待定点的坐标λ、嗘 和h:
电子计算机除了用观测数据计算点位坐标外,还根据一次积分后的速度分量和已知地球参数(仪器所在点的地球子午圈和卯酉圈曲率半径M和N,地球自转角速度ω),连续计算控制惯性平台的力矩信号 WcE、WcN 和WcZ,以便实时跟踪所选定的地平坐标系。
垂直加速度计的输出信号ɑZ,实际是运载体垂直加速度与当地的重力加速度之和。当运载体停止时,它的垂直加速度为零,这时从ɑZ中消除非重力加速度之后,就得到当地的重力加速度g 。
运载体在运动过程中,由计算机通过陀螺仪控制惯性平台,不断地按参考椭球面的曲率进动。由于加速度计误差、陀螺仪漂移和垂线偏差变化等因素的影响,运载体到达待测点停止时,平台将不平行于当地水平面,两个水平加速度计的输出不等于零。消除加速度计误差和陀螺仪漂移后,就得到相对于前一点的垂线偏差变化分量Δζ 和Δη的输出,加上前一点已知的垂线偏差分量ζ0 和η0,便得出待测点的垂线偏差分量ζ和η。
惯性平台的指北方位基准由方位传感器传递,经计算机可随时显示平台外壳光学镜面法线的方位角Q,需要时可用自准直光学经纬仪引出。
精度 惯性测量的精度主要受加速度计和陀螺仪的影响, 70年代以来,加速度计的测量精度为 1×10-5~1×10-7伽;陀螺仪随机漂移率约为10-4~10-6ω,它使测量误差随测量时间的延长而增加。因此,在行进过程中,采用运载体每隔相等时间停下来的方法,以提高测量精度。当运载体停止时,其运动加速度和速度应精确为零,利用这一信息,可以检核和改正前段随时间积累的误差,这一操作称为“零速更新”。在测量时,通常每隔3~5分钟停20~30秒钟,进行一次零速更新。由于惯性测量系统采用了这种独特的方法,使定位精度比惯性导航系统高得多。70年代末,惯性测量系统能达到的精度是:平面位置中误差为±0.5米,高程中误差为±0.2米,重力加速度的中误差为±2毫伽,垂线偏差的中误差为±1.5″。如果用这种系统布设直伸导线,并构成导线网,进行平差后,精度还可以提高。与其他高精度测量方法比较,惯性测量系统的精度仍然偏低,目前只适用于在已知高级控制点之间进行加密。
测量方法 一般用惯性测量系统进行导线测量,首先在实验室和野外检定场检测该系统是否正常,并标定有关参数。在测量导线开始时,惯性测量系统先停在已知起始点,完成初始对准,再一次检测系统,建立平台地平坐标系,并输入已知起始点坐标和当地重力场参数,然后开始导线测量。施测时,每隔相等时间进行“零速更新”,到达待测点停下来自动记录坐标值和其他参数。如此继续测量,直到闭合到已知终点。若有些待测点的位置不便靠近,可利用测距仪和经纬仪测量偏心值,并归算到待测点上。
特点和发展趋势 安装在运载体上的惯性测量系统,不依赖外界的其他辅助设备,能快速而独立地测量λ、嗘、h、g、ζ、η和Q 等多种定位和地球重力场参数,使作业效率大大提高。该系统可以全天候工作,不受大气折射的影响,不要求相邻待测点之间通视,克服了传统大地测量所受的自然条件的限制。因此,惯性测量系统为大地控制网的加密和快速定位开辟了新的途径。80年代以来,在系统上加装重力梯度仪,并配合卫星多普勒定位,还可进一步提高测量精度和工作效率。惯性测量系统的缺点是仪器结构复杂,造价较高,维护工作繁重。但它仍是一种能满足军事测绘要求的全天候快速测量仪器。