分散控制问题解法(卷名:自动控制与系统工程)
solving method for decentralized control problems
求解分散控制问题的计算方法。分散控制采用非经典信息结构,为了求得问题的解,一般要作某些假设。不同的假设条件可得到多种不同的简化模型。对某一简化模型也有多种不同的解法。按信息结构和控制器结构,分散控制问题解法有以下三类。
一步时延共享信息结构的情况
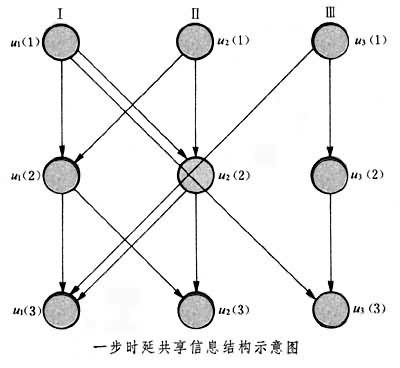 非经典信息结构会导致控制器无限维,控制律为非线性,而难以求得显式解。但也存在一类特殊问题,即一步时延共享信息结构的离散系统问题,它能满足分离原理,能将估计问题与控制问题分开,得到线性最优解。所谓一步时延共享信息结构是指每个控制站在时刻 k能获得从时刻0到时刻k-1包括本站在内的整体系统的全部输入和输出信息,而在时刻 k只能获得本站的观测信息。此处,输入指施加于受控对象上的控制,输出指从控制站对受控对象的观测。在这种情况下,各站的控制只依赖各站本身占有的信息,包括 k-1时刻以前本站和其他各站经通信道送来的全部历史信息以及 k时刻本站即时观测信息。下图为两控制站间的信息交换情况。每一节点对应于某一离散时刻 k,从一点到另一点为一步。在k=2时,Ⅰ站接收k=1步时的u1(1)和u2(1),Ⅱ站接收u2(1)和u1(1),即u1(1)和u2(1)是Ⅰ、Ⅱ站共享的信息。若另有Ⅲ站通过Ⅱ而与Ⅰ耦合,则Ⅰ、Ⅲ便破坏了一步时延关系而变成了二步时延。这样的信息结构可归入队决策理论中部分嵌套信息结构类中。它可以简化为等效的静态队决策问题,从而可用部分嵌套法求解。也可用离散最小值原理求解,但运算较复杂。较方便的是用动态规划法把整个 N步的动态问题分解为 N个静态队决策问题求解。以上各法在线性二次型高斯(LQG)问题的情况下,最优控制律均可表达成观测数据的线性函数。
非经典信息结构会导致控制器无限维,控制律为非线性,而难以求得显式解。但也存在一类特殊问题,即一步时延共享信息结构的离散系统问题,它能满足分离原理,能将估计问题与控制问题分开,得到线性最优解。所谓一步时延共享信息结构是指每个控制站在时刻 k能获得从时刻0到时刻k-1包括本站在内的整体系统的全部输入和输出信息,而在时刻 k只能获得本站的观测信息。此处,输入指施加于受控对象上的控制,输出指从控制站对受控对象的观测。在这种情况下,各站的控制只依赖各站本身占有的信息,包括 k-1时刻以前本站和其他各站经通信道送来的全部历史信息以及 k时刻本站即时观测信息。下图为两控制站间的信息交换情况。每一节点对应于某一离散时刻 k,从一点到另一点为一步。在k=2时,Ⅰ站接收k=1步时的u1(1)和u2(1),Ⅱ站接收u2(1)和u1(1),即u1(1)和u2(1)是Ⅰ、Ⅱ站共享的信息。若另有Ⅲ站通过Ⅱ而与Ⅰ耦合,则Ⅰ、Ⅲ便破坏了一步时延关系而变成了二步时延。这样的信息结构可归入队决策理论中部分嵌套信息结构类中。它可以简化为等效的静态队决策问题,从而可用部分嵌套法求解。也可用离散最小值原理求解,但运算较复杂。较方便的是用动态规划法把整个 N步的动态问题分解为 N个静态队决策问题求解。以上各法在线性二次型高斯(LQG)问题的情况下,最优控制律均可表达成观测数据的线性函数。固定控制器结构且站间无信息交换的情况 为了避开二次推测现象(见大系统分散控制理论),假定控制器的结构为有限维且等于受控对象的维数。限定控制律是本站累积的测量信息的线性函数。站间无在线信息交换,只利用本站的观测来对系统进行状态估计。这时分离定理不成立。考虑到各站是合作关系,最优化的计算宜以组合的方式进行,即同时求取所有各站的“最优”的线性控制律和滤波器参数。由此导出的一种直接算法是按无偏估计的原则把各控制站方程与受控对象方程组合成集中方程的形式,并对随机量取其协方差矩阵,从而将一个随机型分散问题转换成等价的确定型集中问题,这种问题可用矩阵最小值原理法求解,但必须求解难度大的矩阵两点边界值问题。此法还存在维数扩展现象,即集中方程的维数等于受控对象维数的(N+1)倍。N为控制站数。
固定控制器结构但站间有部分信息交换的情况 假定控制器维数等于受控对象的维数,控制律为线性律。一种典型模式是站间只交换各局部滤波器对系统的状态估计值而不交换控制量信息。这时分离定理不成立。最优化计算仍可按组合方式进行。通常只考虑最优化时间为无限长的情况。直接把控制器方程与受控对象方程组合成集中方程,把问题转换为等价的确定型参数最优化问题。这样就可以用多种数学规划方法求解。但一般要解李雅普诺夫方程,因有一定限制不能保证最优解一定存在。维数扩展现象仍不可避免。
除上面三种典型简化模式的解法外,还有所谓控制共享模式,即各站占有不同的整体系统初态和噪声的先验知识,站间只交换控制量而不交换状态估计值。还有一种所谓递阶模式,即站间不直接交换信息但通过上级协调器交换信息。协调器具有整体先验知识,知道下级子系统的动态特性和它们的关联情况。下级控制器只知道根据本身的动态特性,观测值和控制量。上级周期性地对下级进行协调,实际上就是交换信息。这两种简化模式都具有相应的解法。
参考书目
M.G.Singh, Decentralized Control, North-Holland, Publ, Co., Amsterdam, 1981.