采样控制理论(卷名:自动控制与系统工程)
sampled-data control theory
经典控制理论中研究采样控制系统的组成原理、基本特性和分析设计方法的一个分支。采样控制系统不同于连续控制系统,它的特点是系统中一处或几处的信号具有脉冲序列或数字序列的形式。应用采样控制,有利于提高系统的控制精度和抗干扰能力,也有利于提高控制器的利用率和通用性。随着微型计算机的普及,采样控制更显示出其优越性。在采样控制理论中主要采用频率域方法,它以Z变换为数学基础,又称Z变换法。通过引入Z变换,在连续控制系统研究中所采用的许多基本概念(如传递函数、频率响应等)和分析设计法(如稳定性和过渡过程的分析方法、控制系统校正方法等),都可经过适当的修正而推广应用于采样控制系统。在现代控制理论中,与采样控制系统属于同一范畴的离散系统的分析主要采用时间域方法,它是建立在状态空间描述的基础上的,又称状态空间法。采样控制系统按组成原理分为一般采样控制系统和数字控制系统。
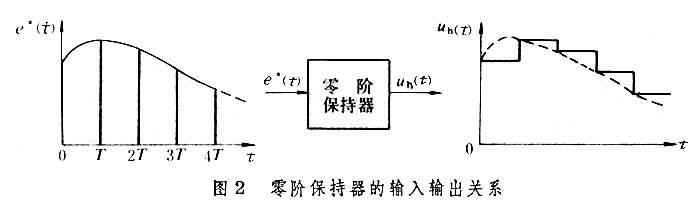
一般采样控制系统 这种系统的典型的组成方式如图1,图中量测元件的作用是把受控对象的输出变量变换为适当的物理量以实现反馈,校正装置的作用是使控制系统获得满意的性能。与一般连续型反馈控制系统不同的是,它包含信号采样和复原的装置。实现采样的装置称为采样器,通常接于误差信号e(t)的作用点。采样器有多种采样形式,最常见的是采样周期为常数的等速采样。当系统中包含有几个采样器时,它们的采样周期必须相等,相位必须同步。一切具有开关功能的装置,如机械开关、数字电路、扫描装置等都可用来作为采样器。连续信号e(t)通过采样器时, 随着采样开关的重复闭合和断开, 变换为一个周期脉冲序列e*(t)。e*(t)的值在采样开关闭合瞬间等于e(t),而在开关断开时等于零。由于受控对象常常是一个具有连续特性的系统,为了使脉冲序列e*(t)中的高频分量不致对它构成干扰和引起机械部件的损坏,e*(t)在作用于连续部件之前需要通过具有滤波功能的装置,复原为连续信号。这类复原装置称为保持器。最简单的保持器是一个低通滤波器,能将脉冲序列转换成在两个相邻采样瞬时之间保持常值的一个阶梯信号(图2),通常称为零阶保持器。它的传递函数为
 ,其中T 为脉冲序列的周期。
,其中T 为脉冲序列的周期。

数字控制系统 数字控制系统是采样控制系统中一种重要的类型。数字控制系统(图3)除了包含信号的采样和复原外,还包含信号量化和复原的过程。把信号幅值变换为数字计算机可接受的数码,称为量化。相应的部件称为模数变换器,简称A/D。使数码恢复为信号幅值的装置则称为数模变换器,简称D/A。通常,数模变换器同时也具备保持器的功能。对信号进行量化的结果使得有可能采用数字计算机作校正装置,通过编制相应的程序,以实现按控制规律所要求的信号校正。数字校正装置在通用性和精确性方面具有明显的优越性。
采样过程的数字处理 为简化问题处理,在采样控制理论中,把连续信号e(t)经过采样器得到的周期性脉冲序列e*(t)理想化为一个数字函数序列,它的表达式为
 式中T 为采样周期,e(kT)是连续信号e(t)在采样瞬时kT(k=0,1,2,...)的值,符号Σ表示所列变量的求和,δ(t-kT)称为作用于kT时刻的单位脉冲函数,它的定义是:
式中T 为采样周期,e(kT)是连续信号e(t)在采样瞬时kT(k=0,1,2,...)的值,符号Σ表示所列变量的求和,δ(t-kT)称为作用于kT时刻的单位脉冲函数,它的定义是: 为了使采样信号能恢复到原连续信号,采样周期T的值不能任意选取,必须符合香农定理所给出的条件,即要求不等式
为了使采样信号能恢复到原连续信号,采样周期T的值不能任意选取,必须符合香农定理所给出的条件,即要求不等式 成立,其中ω1是原连续信号的幅频谱的上限频率,它的含义是信号的傅里叶变换后振荡分量中不包含频率大于ω1 的谐波分量。
成立,其中ω1是原连续信号的幅频谱的上限频率,它的含义是信号的傅里叶变换后振荡分量中不包含频率大于ω1 的谐波分量。采样系统的基本特性 在采样控制理论中,系统的分析和设计都是建立在脉冲传递函数的基础上的。脉冲传递函数表征采样系统的输出输入关系,这个关系用系统输出采样信号的Z变换与输入采样信号的Z变换之比来表示。
采样系统的稳定性 如果已知采样系统的脉冲传递函数G(z)=N(z)/D(z)。那么系统稳定的充分必要条件是特征方程D(z)=0的根均位于z 复数平面上围绕原点的半径为1的单位圆内。常用的判断采样系统稳定性的方法有代数稳定判据、奈奎斯特稳定判据和根轨迹法。
① 代数稳定判据 利用双线性变换
 ,可把z复数平面上单位圆内部映射到r复数平面上除虚轴以外的左半平面内。因此D(z)=0的根均位于z平面的单位圆内等价于
,可把z复数平面上单位圆内部映射到r复数平面上除虚轴以外的左半平面内。因此D(z)=0的根均位于z平面的单位圆内等价于 的根均位于r平面的左半平面内。通过对D*(r)=0运用代数稳定判据,可判断采样系统的稳定性。
的根均位于r平面的左半平面内。通过对D*(r)=0运用代数稳定判据,可判断采样系统的稳定性。② 奈奎斯特稳定判据 对反馈中不包含环节的采样控制系统,用
 表示断开反馈(见反馈控制系统)时的开环脉冲传递函数。DO(z)=0为系统的开环特征方程。当复数变量z由z平面的(1,j0)点出发沿单位圆逆时针方向变化时,在G0(z)复数平面上作出相应的G0(z)的轨线。那么,当 G0(z)轨线沿逆时针方向包围(-1,j0)点的次数恰好等于D0(z)=0在单位圆内的根的个数时,采样控制系统是稳定的。这是连续控制系统的奈奎斯特稳定判据的推广。
表示断开反馈(见反馈控制系统)时的开环脉冲传递函数。DO(z)=0为系统的开环特征方程。当复数变量z由z平面的(1,j0)点出发沿单位圆逆时针方向变化时,在G0(z)复数平面上作出相应的G0(z)的轨线。那么,当 G0(z)轨线沿逆时针方向包围(-1,j0)点的次数恰好等于D0(z)=0在单位圆内的根的个数时,采样控制系统是稳定的。这是连续控制系统的奈奎斯特稳定判据的推广。③ 根轨迹法 把连续控制系统的根轨迹的作图步骤(见根轨迹法)运用于采样系统的开环脉冲传递函数G0(z),可分析采样反馈系统的特征方程根的分布,从而可用来判断系统的稳定性。
采样系统的瞬态响应 采样系统的瞬态响应是指典型输入作用下系统输出的响应。用R(z)表示输入作用r(t)的Z变换,G(z)表示系统的脉冲传递函数,则输出响应c(t)的Z变换C(z)=G(z)R(z)。通过对C(z)求Z变换的反变换即可定出c(t)。通常分析结果只能反映瞬态响应在采样时刻kT(k=0,1,2,...)上的函数值。
采样控制系统的校正 校正是通过引入某种装置使控制系统具有所期望的性能指标的方法。常用的校正装置类型有模拟校正装置和数字校正装置。在一般采样控制系统中采用模拟校正装置,它们常是电阻和电容组成的一个网络。在数字控制系统中采用数字校正装置,它用数字处理或数字计算的方式实现对信号的校正,常可通过编制相应的算法程序由数字计算机来完成。数字控制器的优点,是能以很高的精度来实现所要求的复杂运算,而且只需要通过改变程序就可产生不同的控制校正作用。相应的连续控制系统校正装置的设计方法(见控制系统校正方法),在经过适当的修正后,可用于设计采样控制系统的校正装置。
参考书目
B.C.Kuo, Analysis and Synthesis of Sampled-Data Control Systems, Prentice-Hall Inc.,Englewood Cliffs, N.J., 1963.