运动学(卷名:物理学)
kinematics
经典力学的一个分支。它用几何方法描述物体的运动,而不考虑力和质量等因素。至于物体的运动和力的关系则是动力学的研究课题。要描述物体的运动必须确定一个参照系,因此,单纯从运动学的观点看,对任何运动的描述都是相对的。这里,运动的相对性是指经典力学范畴内的,即在不同的参照系中时间和空间的量度相同,和参照系的运动无关。物体的速度接近光速时,时间和空间的量度就同参照系有关了(见狭义相对论)。
在运动学中主要研究点和刚体的运动规律。点是指没有大小和质量、在空间占据一定位置的几何点。刚体是没有质量、不变形、但有一定形状、占据空间一定位置的形体。运动学包括点的运动学和刚体运动学两部分。
历史概述 运动学在发展的初期,从属于动力学,随着动力学而发展。古代,人们通过对地面物体和天体运动的观察,逐渐形成了物体在空间中位置的变化和时间的概念。中国战国时期在《墨经》中已有关于运动和时间先后的描述。亚里士多德在《物理学》中讨论了落体运动和圆运动,已有了速度的概念。伽利略发现了等加速直线运动中距离与时间二次方成正比的规律,建立了加速度的概念。在对射弹体运动的研究中,他得出抛物线轨迹,并建立了运动(或速度)合成的平行四边形法则,伽利略为点的运动学奠定了基础。在此基础上,C.惠更斯在对摆的运动和I.牛顿在对天体运动的研究中各自独立地提出了离心力的概念,从而发现了向心加速度同速度的二次方成正比、同半径成反比的规律。
18世纪后期,由于天文学、造船业和机械业的发展和需要,L.欧拉用几何方法系统地研究了刚体的定轴转动和刚体的定点运动问题,提出了后人用他的姓氏命名的欧拉角的概念,建立了欧拉运动学方程和刚体有限转动位移定理,由此得到刚体瞬时转动轴和瞬时角速度矢量的概念,深刻地揭示了这种复杂运动形式的基本运动特征。欧拉可称为刚体运动学的奠基人。J.L.拉格朗日和W.R.哈密顿分别引入了广义坐标、广义速度(见拉格朗日方程)和广义动量,为在多维位形空间和相空间中用几何方法描述多自由度质点系统的运动开辟了新的途径,促进了分析动力学的发展。
19世纪末以来,适应不同生产需要、完成不同动作的各种机器相继出现并广泛使用,于是,机构学应运而生。机构学的任务是分析机构的运动规律,根据需要实现的运动设计新的机构和进行机构的综合。现代仪器和自动化技术的发展又促进机构学的进一步发展,提出了各种平面和空间机构运动分析和综合的问题,作为机构学的理论基础,运动学已逐渐脱离动力学而成为经典力学中一个独立的分支。
点的运动学 描述点在空间的位置随时间变化的规律。点在空间所经过的路线称为轨迹,按轨迹形状可分为:点的直线运动、点的平面曲线运动(如圆周运动,椭圆运动和抛物线运动等)和空间曲线运动(如空间螺旋线运动)。空间曲线运动是最一般的情况。点在参照系中的位置用点对于某固定点的矢径r 表示,点的运动规律用矢径的时间函数r=r(t)表示。点的速度和加速度分别用矢径对时间的一阶导数
 和二阶导数
和二阶导数 表示。通常用如下几种坐标系来表示点的运动。
表示。通常用如下几种坐标系来表示点的运动。直角坐标系 点的位置用直角坐标x、y、z表示。点的运动规律表示为
r=x(t)i +y(t)j +z(t)k,式中i、j、k为沿坐标轴的三个单位矢量。
x=x(t), y=y(t), z=z(t)是点的直角坐标运动方程,也可看成是以t为参变量的轨迹方程。点的速度和加速度可分别表示为
 用在 x、y、z上加一个或两个圆点表示对时间的一阶或二阶导数。
用在 x、y、z上加一个或两个圆点表示对时间的一阶或二阶导数。自然轴系 如果点的轨迹已知(图1), 点沿轨迹运动的规律用轨迹上的定点O到M点的弧长(弧坐标)s(t)表示。点的速度和加速度可分别表示为
 ,
, 式中ρ为轨迹的曲率半径;τ、n和b(图1)是分别沿切线、主法线和次法线的三个单位矢量;b=τ×n构成自然轴系。
式中ρ为轨迹的曲率半径;τ、n和b(图1)是分别沿切线、主法线和次法线的三个单位矢量;b=τ×n构成自然轴系。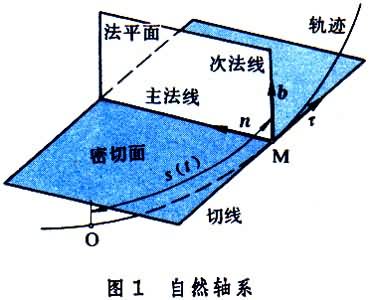

曲线坐标系 可用三个独立变量 q1、q2、q3表示点在空间的位置(图2)。如直角坐标x、y、z和曲线坐标q1、q2、q3之间有一一对应关系,则点的矢径可表示为曲线坐标的矢量函数r=r(q1,q2,q3)。如建立一正交曲线坐标系,e1、e2、e3为沿坐标曲线的切线的三个单位正交矢量,
 。点的速度和加速度可分别表示为
。点的速度和加速度可分别表示为 式中
式中 ,即拉梅系数;
,即拉梅系数; 。直角坐标、柱坐标和球坐标都是正交曲线坐标的特例。
。直角坐标、柱坐标和球坐标都是正交曲线坐标的特例。刚体运动学 研究刚体的各种运动规律。按刚体运动形式可分为以下几种运动。
平动(平移) 运动中刚体上任一直线保持平行;刚体的运动可归结为刚体上任一点的运动。
定轴转动 刚体上一轴线固定不动,刚体的运动方程为θ=θ(t)。刚体的角速度和角加速度分别为
 式中k为沿转动轴的单位矢量。
式中k为沿转动轴的单位矢量。平面运动 刚体上任一点在运动中始终和一固定平面距离不变,刚体的运动方程为
rO=rO(t),θ=θ(t),式中rO为刚体上某一点 O(基点)对参照系中固定点的矢径,如刚体上任一点对基点的矢径为r′,则此点的速度和加速度分别为
v=vO+ω×r′,
α=αO+ α×r′+ω×(ω×r′),式中vO和αO分别为基点 O的速度和加速度;ω和α分别为刚体转动的角速度和角加速度。刚体的瞬时运动可归结为绕瞬时转动中心的转动(见刚体的平面运动)。
定点运动 刚体上一点固定不动,刚体的运动方程可用欧拉角表示为
嗞=嗞(t),θ=θ(t),ψ=ψ(t)。如刚体上任一点到定点的矢径为r,则此点的速度和加速度分别为
 式中ω和α为刚体的瞬时角速度和角加速度矢量。刚体的瞬时运动可归结为绕瞬时转动轴的转动。
式中ω和α为刚体的瞬时角速度和角加速度矢量。刚体的瞬时运动可归结为绕瞬时转动轴的转动。空间一般运动 这是自由刚体运动的最一般形式。可把刚体的运动分解为随基点O的平动和绕基点O作定点运动。刚体的运动方程为
rO=rO(t),嗞=嗞(t),θ=θ(t),ψ=ψ(t)。如刚体上任一点对基点的矢径为r′,则此点的速度和加速度分别为
v=vO+ω×r′,
α=αO+α×r′+ω×(ω×r′),式中vO和αO分别为基点的速度和加速度;ω和α分别为刚体的瞬时角速度和角加速度矢量。刚体的瞬时运动可归结为绕瞬时螺旋轴作螺旋运动。
参考书目
A. Wolf, A History of Science Technology and Philosophy in the 16th and 17th Centuries, George Allen & Unwin, London,1935.
R. Dugas, A History of Mechanics, Routledge & Kegan Paul, London,1957.