radar
electronics
Introduction
electromagnetic sensor used for detecting, locating, tracking, and recognizing objects of various kinds at considerable distances. It operates by transmitting electromagnetic energy toward objects, commonly referred to as targets, and observing the echoes returned from them. The targets may be aircraft, ships, spacecraft, automotive vehicles, and astronomical bodies, or even birds, insects, and rain. Besides determining the presence, location, and velocity of such objects, radar can sometimes obtain their size and shape as well. What distinguishes radar from optical and infrared sensing devices is its ability to detect faraway objects under adverse weather conditions and to determine their range, or distance, with precision.
Radar is an “active” sensing device in that it has its own source of illumination (a transmitter) for locating targets. It typically operates in the microwave region of the electromagnetic spectrum—measured in hertz (cycles per second), at frequencies extending from about 400 megahertz (MHz) to 40 gigahertz (GHz). It has, however, been used at lower frequencies for long-range applications (frequencies as low as several megahertz, which is the HF 【high-frequency】, or shortwave, band) and at optical and infrared frequencies (those of laser radar, or lidar). The circuit components and other hardware of radar systems vary with the frequency used, and systems range in size from those small enough to fit in the palm of the hand to those so enormous that they would fill several football fields.
Radar underwent rapid development during the 1930s and '40s to meet the needs of the military. It is still widely employed by the armed forces, where many technological advances have originated. At the same time, radar has found an increasing number of important civilian applications, notably air traffic control, weather observation, remote sensing of the environment, aircraft and ship navigation, speed measurement for industrial applications and for law enforcement, space surveillance, and planetary observation.
Fundamentals of radar
 Radar typically involves the radiating of a narrow beam of electromagnetic energy into space from an antenna (see the figure-->). The narrow antenna beam scans a region where targets are expected. When a target is illuminated by the beam, it intercepts some of the radiated energy and reflects a portion back toward the radar system. Since most radar systems do not transmit and receive at the same time, a single antenna is often used on a time-shared basis for both transmitting and receiving.
Radar typically involves the radiating of a narrow beam of electromagnetic energy into space from an antenna (see the figure-->). The narrow antenna beam scans a region where targets are expected. When a target is illuminated by the beam, it intercepts some of the radiated energy and reflects a portion back toward the radar system. Since most radar systems do not transmit and receive at the same time, a single antenna is often used on a time-shared basis for both transmitting and receiving.A receiver attached to the output element of the antenna extracts the desired reflected signals and (ideally) rejects those that are of no interest. For example, a signal of interest might be the echo from an aircraft. Signals that are not of interest might be echoes from the ground or rain, which can mask and interfere with the detection of the desired echo from the aircraft. The radar measures the location of the target in range and angular direction. Range, or distance, is determined by measuring the total time it takes for the radar signal to make the round trip to the target and back (see below). The angular direction of a target is found from the direction in which the antenna points at the time the echo signal is received. Through measurement of the location of a target at successive instants of time, the target's recent track can be determined. Once this information has been established, the target's future path can be predicted. In many surveillance radar applications, the target is not considered to be “detected” until its track has been established.
Pulse radar
 The most common type of radar signal consists of a repetitive train of short-duration pulses. The figure--> shows a simple representation of a sine-wave pulse that might be generated by the transmitter of a medium-range radar designed for aircraft detection. The sine wave in the figure represents the variation with time of the output voltage of the transmitter. The numbers given in parentheses in the figure are meant only to be illustrative and are not necessarily those of any particular radar. They are, however, similar to what might be expected for a ground-based radar system with a range of about 50 to 60 nautical miles (90 to 110 km), such as the kind used for air traffic control at airports. The pulse width is given in the figure as 1 microsecond (10−6 second). It should be noted that the pulse is shown as containing only a few cycles of the sine wave; however, in a radar system having the values indicated, there would be 1,000 cycles within the pulse. In the figure the time between successive pulses is given as 1 millisecond (10−3 second), which corresponds to a pulse repetition frequency of 1 kilohertz (kHz). The power of the pulse, called the peak power, is taken here to be 1 megawatt. Since a pulse radar does not radiate continually, the average power is much less than the peak power. In this example, the average power is 1 kilowatt. The average power, rather than the peak power, is the measure of the capability of a radar system. Radars have average powers from a few milliwatts to as much as one or more megawatts, depending on the application.
The most common type of radar signal consists of a repetitive train of short-duration pulses. The figure--> shows a simple representation of a sine-wave pulse that might be generated by the transmitter of a medium-range radar designed for aircraft detection. The sine wave in the figure represents the variation with time of the output voltage of the transmitter. The numbers given in parentheses in the figure are meant only to be illustrative and are not necessarily those of any particular radar. They are, however, similar to what might be expected for a ground-based radar system with a range of about 50 to 60 nautical miles (90 to 110 km), such as the kind used for air traffic control at airports. The pulse width is given in the figure as 1 microsecond (10−6 second). It should be noted that the pulse is shown as containing only a few cycles of the sine wave; however, in a radar system having the values indicated, there would be 1,000 cycles within the pulse. In the figure the time between successive pulses is given as 1 millisecond (10−3 second), which corresponds to a pulse repetition frequency of 1 kilohertz (kHz). The power of the pulse, called the peak power, is taken here to be 1 megawatt. Since a pulse radar does not radiate continually, the average power is much less than the peak power. In this example, the average power is 1 kilowatt. The average power, rather than the peak power, is the measure of the capability of a radar system. Radars have average powers from a few milliwatts to as much as one or more megawatts, depending on the application.A weak echo signal from a target might be as low as 1 picowatt (10−12 watt). In short, the power levels in a radar system can be very large (at the transmitter) and very small (at the receiver).
Another example of the extremes encountered in a radar system is the timing. An air-surveillance radar (one that is used to search for aircraft) might scan its antenna 360 degrees in azimuth in a few seconds, but the pulse width might be about one microsecond in duration. Some radar pulse widths are even of nanosecond (10−9 second) duration.
Radar waves travel through the atmosphere at roughly 300,000 km per second (the speed of light). The range to a target is determined by measuring the time that a radar signal takes to travel out to the target and back. The range to the target is equal to cT/2, where c= velocity of propagation of radar energy, and T= round-trip time as measured by the radar. From this expression, the round-trip travel of the radar signal through air is at a rate of 150,000 km per second. For example, if the time that it takes the signal to travel out to the target and back was measured by the radar to be 0.0006 second (600 microseconds), then the range of the target would be 90 km. The ability to measure the range to a target accurately at long distances and under adverse weather conditions is radar's most distinctive attribute. There are no other devices that can compete with radar in the measurement of range.
The range accuracy of a simple pulse radar depends on the width of the pulse: the shorter the pulse, the better the accuracy. Short pulses, however, require wide bandwidths (bandwidth) in the receiver and transmitter (since bandwidth is equal to the reciprocal of the pulse width). A radar with a pulse width of one microsecond can measure the range to an accuracy of a few tens of metres or better. Some special radars can measure to an accuracy of a few centimetres. The ultimate range accuracy of the best radars is limited by the known accuracy of the velocity at which electromagnetic waves travel.
Directive antennas and target direction
Almost all radars use a directive antenna—i.e., one that directs its energy in a narrow beam. (The beamwidth of an antenna of fixed size is inversely proportional to the radar frequency.) The direction of a target can be found from the direction in which the antenna is pointing when the received echo is at a maximum. A precise means for determining the direction of a target is the monopulse method—in which information about the angle of a target is obtained by comparing the amplitudes of signals received from two or more simultaneous receiving beams, each slightly offset (squinted) from the antenna's central axis. A dedicated tracking radar—one that follows automatically a single target so as to determine its trajectory—generally has a narrow, symmetrical “pencil” beam. (A typical beamwidth might be about 1 degree.) Such a radar system can determine the location of the target in both azimuth angle and elevation angle. An aircraft-surveillance radar generally employs an antenna that radiates a “fan” beam, one that is narrow in azimuth (about 1 or 2 degrees) and broad in elevation (elevation beamwidths of from 20 to 40 degrees or more). A fan beam allows only the measurement of the azimuth angle.
Doppler frequency and target velocity
Radar can extract the Doppler frequency shift of the echo produced by a moving target by noting how much the frequency of the received signal differs from the frequency of the signal that was transmitted. (The Doppler effect in radar is similar to the change in audible pitch experienced when a train whistle or the siren of an emergency vehicle moves past the listener.) A moving target will cause the frequency of the echo signal to increase if it is approaching the radar or to decrease if it is receding from the radar. For example, if a radar system operates at a frequency of 3,000 MHz and an aircraft is moving toward it at a speed of 400 knots (740 km per hour), the frequency of the received echo signal will be greater than that of the transmitted signal by about 4.1 kHz. The Doppler frequency shift in hertz is equal to 3.4 f0vr, where f0 is the radar frequency in gigahertz and vr is the radial velocity (the rate of change of range) in knots.
Since the Doppler frequency shift is proportional to radial velocity, a radar system that measures such a shift in frequency can provide the radial velocity of a target. The Doppler frequency shift can also be used to separate moving targets from stationary targets even when the echo signal from undesired clutter is much more powerful than the echo from the desired moving targets. A form of pulse radar that uses the Doppler frequency shift to eliminate stationary clutter is called either a moving-target indication (MTI) radar or a pulse Doppler radar, depending on the particular parameters of the signal waveform.
The above measurements of range, angle, and radial velocity assume that the target is a “point-scatterer.” Actual targets, however, are of finite size and can have distinctive shapes. The range profile of a finite-sized target can be determined if the range resolution of the radar is small compared with the target's size in the range dimension. (The range resolution of a radar, given in units of distance, is a measure of the ability of a radar to separate two closely spaced echoes.) Some radars can have resolutions much smaller than one metre, which is quite suitable for determining the radial size and profile of many targets of interest.
The resolution in angle, or cross range, that can be obtained with conventional antennas is poor compared with that which can be obtained in range. It is possible, however, to achieve good resolution in angle by resolving in Doppler frequency (i.e., separating one Doppler frequency from another). If the radar is moving relative to the target (as when the radar is on an aircraft and the target is the ground), the Doppler frequency shift will be different for different parts of the target. Thus, the Doppler frequency shift can allow the various parts of the target to be resolved. The resolution in cross range derived from the Doppler frequency shift is far better than that achieved with a narrow-beam antenna. It is not unusual for the cross-range resolution obtained from Doppler frequency to be comparable to that obtained in the range dimension.
Radar imaging
Radar can distinguish one kind of target from another (such as a bird from an aircraft), and some systems are able to recognize specific classes of targets (for example, a commercial airliner as opposed to a military jet fighter). Target recognition is accomplished by measuring the size and speed of the target and by observing the target with high resolution in one or more dimensions. Propellers and jet engines modify the radar echo from aircraft and can assist in target recognition. The flapping of the wings of a bird in flight produces a characteristic modulation that can be used to recognize that a bird is present or even to distinguish one type of bird from another.
Cross-range resolution obtained from Doppler frequency, along with range resolution, is the basis for synthetic aperture radar (SAR). SAR produces an image of a scene that is similar, but not identical, to an optical photograph. One should not expect the image seen by radar “eyes” to be the same as that observed by optical eyes. Each provides different information. Radar and optical images differ because of the large difference in the frequencies involved; optical frequencies are approximately 100,000 times higher than radar frequencies.
SAR can operate from long range and through clouds or other atmospheric effects that limit optical and infrared imaging sensors. The resolution of a SAR image can be made independent of range, an advantage over passive optical imaging where the resolution worsens with increasing range. Synthetic aperture radars that map areas of the Earth's surface with resolutions of a few metres can provide information about the nature of the terrain and what is on the surface.
A SAR operates on a moving vehicle, such as an aircraft or spacecraft, to image stationary objects or planetary surfaces. Since relative motion is the basis for the Doppler resolution, high resolution (in cross range) also can be accomplished if the radar is stationary and the target is moving. This is called inverse synthetic aperture radar (ISAR). Both the target and the radar can be in motion with ISAR.
A basic radar system
 The figure--> shows the basic parts of a typical radar system. The transmitter generates the high-power signal that is radiated by the antenna. In a sense, an antenna acts as a “transducer” to couple electromagnetic energy from the transmission line to radiation in space, and vice versa. The duplexer permits alternate transmission and reception with the same antenna; in effect, it is a fast-acting switch that protects the sensitive receiver from the high power of the transmitter.
The figure--> shows the basic parts of a typical radar system. The transmitter generates the high-power signal that is radiated by the antenna. In a sense, an antenna acts as a “transducer” to couple electromagnetic energy from the transmission line to radiation in space, and vice versa. The duplexer permits alternate transmission and reception with the same antenna; in effect, it is a fast-acting switch that protects the sensitive receiver from the high power of the transmitter.The receiver selects and amplifies radar echoes so that they can be displayed on a television-like screen for the human operator or be processed by a computer. The signal processor separates the signals reflected by possible targets from unwanted clutter. Then, on the basis of the echo's exceeding a predetermined value, a human operator or a digital computer circuit decides whether a target is present.
Once it has been decided that a target is present and its location (in range and angle) has been determined, the track of the target can be obtained by measuring the target location at different times. During the early days of radar, target tracking was performed by an operator marking the location of the target “blip” on the face of a cathode-ray tube (CRT) display with a grease pencil. Manual tracking has been largely replaced by automatic electronic tracking, which can process hundreds or even thousands of target tracks simultaneously.
The system control optimizes various parameters on the basis of environmental conditions and provides the timing and reference signals needed to permit the various parts of the radar to operate effectively as an integrated system. Further descriptions of the major parts of a radar system are given below.
Antennas (antenna)

 A widely used form of radar antenna is the parabolic reflector, the principle of which is shown in cross section in part A of the figure-->. A horn antenna or other small antenna is placed at the focus of the parabola to illuminate the parabolic surface of the reflector. After being reflected by this surface, the electromagnetic energy is radiated as a narrow beam. A paraboloid, which is generated by rotating a parabola about its axis, forms a symmetrical beam called a pencil beam. A fan beam, one with a narrow beamwidth in azimuth and a broad beamwidth in elevation, can be obtained by illuminating an asymmetrical section of the paraboloid. An example of an antenna that produces a fan beam is shown in the photograph-->.
A widely used form of radar antenna is the parabolic reflector, the principle of which is shown in cross section in part A of the figure-->. A horn antenna or other small antenna is placed at the focus of the parabola to illuminate the parabolic surface of the reflector. After being reflected by this surface, the electromagnetic energy is radiated as a narrow beam. A paraboloid, which is generated by rotating a parabola about its axis, forms a symmetrical beam called a pencil beam. A fan beam, one with a narrow beamwidth in azimuth and a broad beamwidth in elevation, can be obtained by illuminating an asymmetrical section of the paraboloid. An example of an antenna that produces a fan beam is shown in the photograph-->.The half-wave dipole, whose dimension is one-half of the radar wavelength, is the classic type of electromagnetic antenna. A single dipole is not of much use for radar, since it produces a beamwidth too wide for most applications. Radar requires a narrow beam (a beamwidth of only a few degrees) in order to concentrate its energy on the target and to determine the target location with accuracy. Such narrow beams can be formed by combining many individual dipole antennas so that the signals radiated or received by each elemental dipole are in unison, or in step. (The radar engineer would say that the signals are “in phase” with one another or that they are coherently added together.) This is called a phased-array antenna.
The phase shifters at each radiating antenna-element change (or shift) the phase of the signal, so that all signals received from a particular direction will be in step with one another. As a result, the signals received at the elements add together without theoretical loss. Similarly, all signals radiated by the individual elements of the antenna will be in step with one another in some specific direction. Changing the phase shift at each element alters the direction of the antenna beam. An antenna of this kind is called an electronically steered phased-array. It allows rapid changes in the position of the beam without moving large mechanical structures. In some systems the beam can be changed from one direction to another within microseconds.
The individual radiating elements of a phased-array antenna need not be dipoles; various other types of antenna elements also can be used. For example, slots cut in the side of a waveguide are common, especially at the higher microwave frequencies. In a radar that requires a one-degree pencil-beam antenna, there might be about 5,000 individual radiating elements (the actual number depends on the particular design). The phased-array radar is more complex than radar systems that employ reflector antennas, but it provides capabilities not otherwise available.
Since there are many control points (each individual antenna element) in a phased-array, the radiated beam can be shaped to give a desired pattern to the beam. Controlling the shape of the radiated beam is important when the beam has to illuminate the airspace where aircraft are found but not illuminate the ground, where clutter echoes are produced. Another example is when the stray radiation (called antenna sidelobes) outside the main beam of the antenna pattern must be minimized.
The electronically steered phased-array is attractive for applications that require large antennas or when the beam must be rapidly changed from one direction to another. Satellite surveillance radars and long-range ballistic-missile-detection radars are examples that usually require phased-arrays. The U.S. Army's Patriot battlefield air-defense system and the U.S. Navy's Aegis system for ship air defense also depend on the electronically steered phased-array antenna.
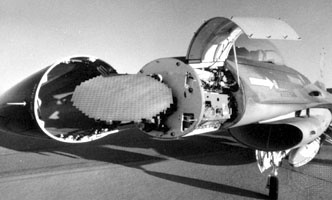 The phased-array antenna is also used in some applications without the phase shifters. The beam is steered by the mechanical movement of the entire antenna. Antennas of this sort are preferred over the parabolic reflector for airborne applications (see the photograph-->), in land-based air-surveillance radars requiring multiple beams (as in the so-called 3D radars, which measure elevation angle in addition to azimuth and range), and in applications that require ultralow antenna sidelobe radiation.
The phased-array antenna is also used in some applications without the phase shifters. The beam is steered by the mechanical movement of the entire antenna. Antennas of this sort are preferred over the parabolic reflector for airborne applications (see the photograph-->), in land-based air-surveillance radars requiring multiple beams (as in the so-called 3D radars, which measure elevation angle in addition to azimuth and range), and in applications that require ultralow antenna sidelobe radiation.Transmitters
The transmitter of a radar system must be efficient, reliable, not too large in size and weight, and easily maintained, as well as have the wide bandwidth and high power that are characteristic of radar applications. In general, the transmitter must generate low-noise, stable transmissions so that extraneous (unwanted) signals from the transmitter do not interfere with the detection of the small Doppler frequency shift produced by weak moving targets.
It is observed in the section History of radar (radar) that the invention of the magnetron transmitter in the late 1930s resulted in radar systems that could operate at the higher frequencies known as microwaves. The magnetron transmitter has certain limitations, but it continues to be used, for example, in low-average-power applications such as ship navigation radar and airborne weather-avoidance radar. The magnetron is a power oscillator in that it self-oscillates (i.e., generates microwave energy) when voltage is applied. Other radar transmitters usually are power amplifiers in that they take low-power signals at the input and amplify them to high power at the output. This provides stable high-power signals, as the signals to be radiated can be generated with precision at low power.
The klystron amplifier is capable of some of the highest power levels used in radar (many hundreds of kilowatts of average power). It has good efficiency and good stability. The disadvantages of the klystron are that it is usually large and it requires high voltages (e.g., about 90 kilovolts for one megawatt of peak power). At low power the instantaneous bandwidth of the klystron is small, but the klystron is capable of large bandwidth at high peak powers of a few megawatts.
The traveling-wave tube (TWT) is related to the klystron. It has very wide bandwidths at low peak power, but, as the peak power levels are increased to those needed for pulse radar, its bandwidth decreases. As peak power increases, the bandwidths of the TWT and the klystron approach one another.
Solid-state transmitters, such as the transistor, are attractive because of their potential for long life, ease of maintenance, and relatively wide bandwidth. An individual solid-state device generates relatively low power and can be used only when the radar application can be accomplished with low power (as in short-range applications or in the radar altimeter). High power can be achieved, however, by combining the outputs of many individual solid-state devices.
While the solid-state transmitter is easy to maintain and is capable of wide-band operation, it has certain disadvantages. It is much better suited for long pulses (milliseconds) than for short pulses (microseconds). Long pulses can complicate radar operation because signal processing (such as pulse compression) is needed to achieve the desired range resolution. Furthermore, a long-pulse radar generally requires several different pulse widths: a long pulse for long range and one or more shorter, high-energy pulses with less energy to observe targets at the ranges masked when the long pulse is transmitting. (A one-millisecond pulse, for example, masks echoes from 0 to about 80 nautical miles, or 150 km.)
Every kind of transmitter has its disadvantages as well as advantages. In any particular application, the radar engineer must continually search for compromises that give the results desired without too many negative effects that cannot be adequately accommodated.
Receivers
Like most other receivers, the radar receiver is a classic superheterodyne (superheterodyne reception). It has to filter the desired echo signals from clutter and receiver noise that interfere with detection. It also must amplify the weak received signals to a level where the receiver output is large enough to actuate a display or a computer. The technology of the radar receiver is well established and seldom sets a limit on radar performance.
The receiver must have a large dynamic range in situations where it is necessary to detect weak signals in the presence of very large clutter echoes by recognizing the Doppler frequency shift of the desired moving targets. Dynamic range can be loosely described as the ratio of the strongest to the weakest signals that can be handled without significant distortion by a receiver. A radar receiver might be required to detect signals that vary in power by a million to one—and sometimes much more.
In most cases the sensitivity of a radar receiver is determined by the noise generated internally at its input. Because it does not generate much noise of its own, a transistor is usually used as the first stage of a receiver.
Signal and data processors (information processing)
The signal processor is the part of the receiver that extracts the desired target signal from unwanted clutter. It is not unusual for these undesired reflections to be much larger than desired target echoes, in some cases more than one million times larger. Large clutter echoes from stationary objects can be separated from small moving target echoes by noting the Doppler frequency shift produced by the moving targets. Most signal processing is performed digitally with computer technology. Digital processing has significant capabilities in signal processing not previously available with analog methods.
Pulse compression is sometimes included under signal processing. It too benefits from digital technology, but analog processors (e.g., surface acoustic wave delay lines) are used rather than digital methods when pulse compression must achieve resolutions of a few feet or less.
Displays
Although it has its limitations, the cathode-ray tube (CRT) has been the preferred technology for displaying information ever since the early days of radar. There have been, however, considerable improvements in flat-panel displays because of the demands of computers and television. Flat-panel displays occupy less volume and require less power than CRTs, but they also have their limitations. Radar has taken advantage of flat-panel displays and has become increasingly important as a display.
In the early days of radar, an operator decided whether a target was present on the basis of what raw data were displayed. Modern radars, however, present processed information to the operator. Detections are made automatically in the receiver without operator involvement and are then presented on the display to the operator for further action.
A commonly used radar display is the plan position indicator (PPI), which provides a maplike presentation in polar coordinates of range and angle. The display is “dark” except when echo signals are present.
All practical radar displays have been two-dimensional, yet many radars provide more information than can be displayed on the two coordinates of a flat screen. Colour coding of the signal indicated on the PPI is sometimes used to provide additional information about the echo signal. Colour has been employed, for example, to indicate the strength of the echo. Doppler weather radars make good use of colour coding to indicate on a two-dimensional display the levels of rain intensity associated with each echo shown. They also utilize colour to indicate the radial speed of the wind, the wind shear, and other information relating to severe storms.
Factors affecting radar performance
The performance of a radar system can be judged by the following: (1) the maximum range at which it can see a target of a specified size, (2) the accuracy of its measurement of target location in range and angle, (3) its ability to distinguish one target from another, (4) its ability to detect the desired target echo when masked by large clutter echoes, unintentional interfering signals from other “friendly” transmitters, or intentional radiation from hostile jamming (if a military radar), (5) its ability to recognize the type of target, and (6) its availability (ability to operate when needed), reliability, and maintainability. Some of the major factors that affect performance are discussed in this section.
Transmitter power and antenna size
The maximum range of a radar system depends in large part on the average power of its transmitter and the physical size of its antenna. (In technical terms, this is called the power-aperture product.) There are practical limits to each. As noted before, some radar systems have an average power of roughly one megawatt. Phased-array radars about 100 feet (30 metres) in diameter are not uncommon; some are much larger. There are specialized radars with (fixed) antennas, such as some HF over-the-horizon radars and the U.S. Space Surveillance System (SPASUR), that extend more than one mile (1.6 km).
Receiver noise
The sensitivity of a radar receiver is determined by the unavoidable noise that appears at its input. At microwave radar frequencies, the noise that limits detectability is usually generated by the receiver itself (i.e., by the random motion of electrons at the input of the receiver) rather than by external noise that enters the receiver via the antenna. A radar engineer often employs a transistor amplifier as the first stage of the receiver even though lower noise can be obtained with more sophisticated (and more complex) devices. This is an example of the application of the basic engineering principle that the “best” performance that can be obtained might not necessarily be the solution that best meets the needs of the user.
The receiver is designed to enhance the desired signals and to reduce the noise and other undesired signals that interfere with detection. A designer attempts to maximize the detectability of weak signals by using what radar engineers call a “matched filter,” which is a filter that maximizes the signal-to-noise ratio at the receiver output. The matched filter has a precise mathematical formulation that depends on the shape of the input signal and the character of the receiver noise. A suitable approximation to the matched filter for the ordinary pulse radar, however, is one whose bandwidth in hertz is the reciprocal of the pulse width in seconds.
Target size
The size of a target as “seen” by radar is not always related to the physical size of the object. The measure of the target size as observed by radar is called the radar cross section and is given in units of area (square metres). It is possible for two targets with the same physical cross-sectional area to differ considerably in radar size, or radar cross section. For example, a flat plate 1 square metre in area will produce a radar cross section of about 1,000 square metres at a frequency of 3 GHz when viewed perpendicular to the surface. A cone-sphere (an object resembling an ice-cream cone) when viewed in the direction of the cone rather than the sphere could have a radar cross section of about 0.001 square metre even though its projected area is also 1 square metre. In theory, the radar cross section has little to do with the size of the cone or the cone angle. Thus, the flat plate and the cone-sphere can have radar cross sections that differ by a million to one even though their physical projected areas are the same.
The sphere is an unusual target in that its radar cross section is the same as its physical cross-sectional area (when its circumference is large compared with the radar wavelength). That is to say, a sphere with a projected area of 1 square metre has a radar cross section of 1 square metre.
Commercial aircraft might have radar cross sections from about 10 to 100 square metres, except when viewed broadside, where the cross sections are much larger. Most air-traffic-control (air-traffic control) radars are required to detect aircraft with a radar cross section as low as 2 square metres, since some small general-aviation aircraft can be of this value. For comparison, the radar cross section of a man has been measured at microwave frequencies to be about 1 square metre. A bird can have a cross section of 0.01 to 0.001 square metre. Although this is a small value, a bird can be readily detected at ranges of several tens of kilometres by long-range radar. In general, many birds can be detected by radar, so special measures must usually be taken to ensure that their echoes do not interfere with the detection of desired targets.
The radar cross section of an aircraft and that of most other targets of practical interest fluctuate rapidly as the aspect of the target changes with respect to the radar unit. It would not be unusual for a slight change in aspect to cause the radar cross section to change by a factor of 10 to 1,000.
Clutter
Echoes from land, sea, rain, snow, hail, birds, insects, auroras, and meteors are of interest to those who observe and study the environment, but they are a nuisance to those who want to detect aircraft, ships, missiles, or other similar targets. Clutter echoes can seriously limit the capability of a radar system; thus, a significant part of radar design is devoted to minimizing the effects of clutter without reducing the echoes from desired targets. The Doppler frequency shift is the usual means by which moving targets are distinguished from the clutter of stationary objects. Detection of targets in rain is less of a problem at the lower frequencies, since the radar echo from rain decreases rapidly with decreasing frequency and the average cross section of aircraft is relatively independent of frequency in the microwave region. Because raindrops are more or less spherical (symmetrical) and aircraft are asymmetrical, the use of circular polarization can enhance the detection of aircraft in rain. With circular polarization, the electric field rotates at the radar frequency. Because of this, the electromagnetic energy reflected by the rain and the aircraft will be affected differently, which thereby makes it easier to distinguish between the two. (In fair weather most radars use linear polarization; i.e., the direction of the electric field is fixed.)
Atmospheric effects
As was mentioned, rain and other forms of precipitation can cause echo signals that mask the desired target echoes. There are other atmospheric phenomena that can affect radar performance as well. The decrease in density of the Earth's atmosphere with increasing altitude causes radar waves to bend as they propagate through the atmosphere. This usually increases the detection range at low angles to a slight extent. The atmosphere can form “ducts” that trap and guide radar energy around the curvature of the Earth and allow detection at ranges beyond the normal horizon. Ducting over water is more likely to occur in tropical climates than in colder regions. Ducts can sometimes extend the range of an airborne radar, but on other occasions they may cause the radar energy to be diverted and not illuminate regions below the ducts. This results in the formation of what are called radar holes in the coverage. Since it is not predictable or reliable, ducting can in some instances be more of a nuisance than a help.
Loss of radar energy due to atmospheric absorption, when propagation is through the clear atmosphere or rain, is usually small for most systems operating at microwave frequencies.
interference
Signals from nearby radars and other transmitters can be strong enough to enter a radar receiver and produce spurious responses. Well-trained operators are not often deceived by interference, though they may find it a nuisance. Interference is not as easily ignored by automatic detection and tracking systems, however, and so some method is usually needed to recognize and remove interference pulses before they enter the automatic detector and tracker of a radar.
Electronic countermeasures (electronic warfare)
The purpose of hostile electronic countermeasures (ECM) is to degrade the effectiveness of military radar deliberately. ECM can consist of (1) noise jamming that enters the receiver via the antenna and increases the noise level at the input of the receiver, (2) false target generation, or repeater jamming, by which hostile jammers introduce additional signals into the radar receiver in an attempt to confuse the receiver into thinking that they are real target echoes, (3) chaff, which is an artificial cloud consisting of a large number of tiny metallic reflecting strips that create strong echoes over a large area to mask the presence of real target echoes or to create confusion, and (4) decoys, which are small, inexpensive air vehicles or other objects designed to appear to the radar as if they are real targets. Military radars are also subject to direct attack by conventional weapons or by antiradiation missiles (ARMs) that use radar transmissions to find the target and home in on it. A measure of the effectiveness of military radar is the large sums of money spent on electronic warfare measures, ARMs, and low-cross-section (stealth) aircraft.
Military radar engineers have developed various ways of countering hostile ECM and maintaining the ability of a radar system to perform its mission. It might be noted that a military radar system can often accomplish its mission satisfactorily even though its performance in the presence of ECM is not what it would be if such measures were absent.
Examples of radar systems
Airport surveillance radar
Airport surveillance radar systems are capable of reliably detecting and tracking aircraft at altitudes below 25,000 feet (7,620 metres) and within 40 to 60 nautical miles (75 to 110 km) of their airport. Systems of this type have been installed at more than 100 major airports throughout the United States. One such system, the ASR-9, is designed to be operable at least 99.9 percent of the time, which means that the system is down less than 10 hours per year. This high availability is attributable to reliable electronic components, a “built-in test” to search for failures, remote monitoring, and redundancy (i.e., the system has two complete channels except for the antenna; when one channel must be shut down for repair, the other continues to operate). The ASR-9 is designed to operate unattended, with no maintenance personnel at the radar site. A number of radar units can be monitored and controlled from a single location. When trouble occurs, the fault is identified and a maintenance person dispatched for repair.
Echoes from rain that mask the detection of aircraft are reduced by the use of Doppler filtering and other techniques devised to separate moving aircraft from undesired clutter. It is important, however, for air traffic controllers to recognize areas of severe weather so that they can direct aircraft safely around, rather than through, rough or hazardous conditions. The ASR-9 has a separate receiving channel that recognizes weather echoes and provides their location to air traffic controllers. Six different levels of precipitation intensity can be displayed, with or without the aircraft targets superimposed.
The ASR-9 system operates at frequencies from 2.7 to 2.9 GHz (within the S band). Its klystron transmitter has a peak power of 1.3 megawatts, a pulse width of 1 microsecond, and an antenna with a horizontal beamwidth of 1.4 degrees that rotates at 12.5 revolutions per minute (4.8-second rotation period).
The reflector antenna shown in the photograph--> is a section of a paraboloid. It is 16.5 feet (5 metres) wide and 9 feet (2.75 metres) high. Atop the radar antenna (riding piggyback) is a lightweight planar-array antenna for the air-traffic-control radar-beacon system (ATCRBS). Its dimensions are 26 feet (8 metres) by 5.2 feet (1.6 metres). ATCRBS is the primary means for detecting and identifying aircraft equipped with a transponder that can reply to the ATCRBS interrogation. The ATCRBS transmitter, which is independent of the radar system and operates at a different frequency, radiates a coded interrogation signal. Aircraft equipped with a suitable transponder can recognize the interrogation and send a coded reply at a frequency different from the interrogation frequency. The interrogator might then ask the aircraft, by means of other coded signals, to automatically identify itself and to report its altitude. ATCRBS works only with cooperative targets (i.e., those with an operational transponder).The ASR-11 and ASR-12 are airport surveillance radars that utilize a solid-state (transistor) transmitter and long pulses rather than a klystron transmitter and short pulses.
Doppler weather radar
For many years radar has been used to provide information about the intensity and extent of rain and other forms of precipitation. This application of radar is well known in the United States from the familiar television weather (weather forecasting) reports of precipitation observed by the radars of the National Weather Service. A major improvement in the capability of weather radar came about when engineers developed new radars that could measure the Doppler frequency shift in addition to the magnitude of the echo signal reflected from precipitation. The Doppler frequency shift is important because it is related to the radial velocity of the precipitation blown by wind (the component of the wind moving either toward or away from the radar installation). Since tornadoes, mesocyclones (which spawn tornadoes), hurricanes, and other hazardous weather phenomena tend to rotate, measurement of the radial wind speed as a function of viewing angle will identify rotating weather patterns. (Rotation is indicated when the measurement of the Doppler frequency shift shows that the wind is coming toward the radar at one angle and away from it at a nearby angle.)
The pulse Doppler weather radars employed by the National Weather Service, which are known as Nexrad, make quantitative measurements of precipitation, warn of potential flooding or dangerous hail, provide wind speed and direction, indicate the presence of wind shear and gust fronts, track storms, predict thunderstorms, and provide other meteorological information. In addition to measuring precipitation (from the intensity of the echo signal) and radial speed (from the Doppler frequency shift), Nexrad also measures the spread in radial speed (difference between the maximum and the minimum speeds) of the precipitation particles within each radar resolution cell. The spread in radial speed is an indication of wind turbulence.
Another improvement in the weather information provided by Nexrad is the digital processing of radar data, a procedure that renders the information in a form that can be interpreted by an observer who is not necessarily a meteorologist. The computer automatically identifies severe weather effects and indicates their nature on a display viewed by the observer. High-speed communication lines integrated with the Nexrad system allow timely weather information to be transmitted for display to various users.
The Nexrad radar operates at S-band frequencies (2.7 to 3 GHz) and is equipped with a 28-foot- (8.5-metre-) diameter antenna. It takes five minutes to scan its 1 degree beamwidth through 360 degrees in azimuth and from 0 to 20 degrees in elevation. The Nexrad system can measure rainfall up to a distance of 460 km and determine its radial velocity as far as 230 km.
A serious weather hazard to aircraft in the process of landing or taking off from an airport is the downburst, or microburst. This strong downdraft causes wind shear capable of forcing aircraft to the ground. Terminal Doppler weather radar (TDWR) is the name of the type of system at or near airports that is specially designed to detect dangerous microbursts. It is similar in principle to Nexrad but is a shorter-range system since it has to observe dangerous weather phenomena only in the vicinity of an airport. It operates from 5.60 to 5.65 GHz (C band) to avoid interference with the lower frequencies of Nexrad and ASR systems.
Airborne combat radar
A modern combat aircraft is generally required not only to intercept hostile aircraft but also to attack surface targets on the ground or sea. The radar that serves such an aircraft must have the capabilities to perform these distinct military missions. This is not easy because each mission has different requirements. The different ranges, accuracies, and rates at which the radar data is required, the effect of the environment (land or sea clutter), and the type of target (land features or moving aircraft) call for different kinds of radar waveforms (different pulse widths and pulse repetition frequencies). In addition, an appropriate form of signal processing is required to extract the particular information needed for each military function. Radar for combat aircraft must therefore be multimode—i.e., operate with different waveforms, signal processing, and antenna scanning. It would not be unusual for an airborne combat radar to have from 8 to 10 air-to-air modes and 6 to 10 air-to-surface modes. Furthermore, the radar system might be required to assist in rendezvous with a companion combat craft or with a refueling aircraft, provide guidance of air-to-air missiles, and counter hostile electronic jamming. The problem of achieving effectiveness with these many modes is a challenge for radar designers and is made more difficult by the size and weight constraints on combat aircraft.
The AN/APG-68(V)XM radar built for the U.S. F-16 (C/D) fighter is shown in the photograph-->. This is a pulse Doppler radar system that operates in a portion of the X-band (8- to 12-GHz) region of the spectrum. It occupies a volume of less than 0.13 cubic metre (4.6 cubic feet), weighs less than 164 kg (362 pounds), and requires an input power of 5.6 kilowatts. It can search 120 degrees in azimuth and elevation and is supposed to have a range of 35 nautical miles (65 km) in the “look-up” mode and 27.5 nautical miles (50 km) in the “look-down” mode. The look-up mode is a more or less conventional radar mode with a low pulse-repetition-frequency (prf) that is used when the target is at medium or high altitude and no ground-clutter echoes are present to mask target detection. The look-down mode uses a medium-prf Doppler waveform and signal processing that provide target detection in the presence of heavy clutter. (A low prf for an X-band combat radar might be from 250 hertz to 5 kHz, a medium prf from 5 to 20 kHz, and a high prf from 100 to 300 kHz.) Radars for larger combat aircraft can have greater capability but are, accordingly, bigger and heavier than the system just described.The AN/APG-77 radar for the U.S. Air Force F-22 stealth dual-role fighter employs what is called an active-aperture phased-array radar rather than a mechanically scanned planar-array antenna. At each radiating element of the active-aperture phased-array is an individual transmitter, receiver, phase shifter, duplexer, and control.
Ballistic missile defense and satellite-surveillance radars
The systems for detecting and tracking ballistic missiles and orbiting satellites are much larger than those for aircraft detection because the ranges are longer and the radar echoes from space targets can be smaller than echoes from aircraft. Such radars might be required to have maximum ranges of 2,000 to 3,000 nautical miles (3,700 to 5,600 km), as compared with 200 nautical miles (370 km) for a typical long-range aircraft-detection system. The average power of the transmitter for a ballistic missile defense (BMD) radar can be from several hundred kilowatts to one megawatt or more, which is about 100 times greater than the average power of radars designed for aircraft detection. Antennas for this application have dimensions on the order of tens of metres to a hundred metres or more and are electronically scanned phased-array antennas capable of steering the radar beam without moving large mechanical structures. Radar systems for long-range ballistic missile detection and satellite surveillance are commonly found at the lower frequencies (typically at frequency bands of 420–450 MHz and 1,215–1,400 MHz).
The Pave Paws radar (AN/FPS-115) is an ultrahigh-frequency ( UHF; 420–450 MHz) phased-array system for detecting submarine-launched ballistic missiles. It is supposed to detect targets with a radar cross section of 10 square metres at a range of 3,000 nautical miles (5,600 km). The array antenna contains 1,792 active elements within a diameter of 72.5 feet (22 metres). Each active element is a module with its own solid-state transmitter, receiver, duplexer, and phase shifter. The total average power per antenna is about 145 kilowatts. Two antennas make up a system, with each capable of covering a sector 120 degrees in azimuth. Vertical coverage is from 3 to 85 degrees. An upgraded variant of this type of radar is used in the Ballistic Missile Early Warning System (BMEWS) network, with installations in Alaska, Greenland, and England. BMEWS is designed to provide warning of intercontinental ballistic missiles (ICBMs). Each array antenna measures about 82 feet (25 metres) across and has 2,560 active elements identical to those of the Pave Paws system. Both the BMEWS and Pave Paws radars detect and track satellites and other space objects in addition to warning of the approach of ballistic missiles.
A BMD radar has to engage one or more relatively small reentry vehicles (RVs) that carry a warhead. Ballistic missile RVs can be made to have a very low echo (low radar cross section) when illuminated by radar. They were the original low-radar-cross-section targets and appeared more than 20 years before the more highly publicized stealth aircraft became a reality in the late 1980s. Ballistic missile defense requires battle-management radars that not only detect and track a relatively small target at sufficient range to engage effectively but also must reliably distinguish the reentry vehicles that carry warheads from the many confusion targets that can be present. Confusion targets include decoys, chaff (strips of metallic foil that produce an echo similar in size to that of the reentry vehicle), exploded tank fragments, and other objects released by the attacking missile. The BMD radar must also be able to fulfill its mission in spite of hostile countermeasures and defend against ballistic missiles that can reenter at low angles (depressed trajectories). In addition, the radar must be located in a defended region and be hardened to survive either a conventional or a nuclear attack.
There are at least two basic approaches to ballistic missile defense depending on whether the RV is engaged outside the atmosphere (exoatmospheric) or within the atmosphere (endoatmospheric). Exoatmospheric engagement is attractive, since it occurs at long range and a single system can defend a large area, but it requires some reliable method to select the warhead from the many extraneous objects that can accompany the warhead. An endoatmospheric ballistic missile defense system takes advantage of the slowing down of the lighter objects (decoys, chaff, and fragments) when they reenter the atmosphere and encounter air resistance. After reentry, the heavy warhead will be separated from the accompanying lighter “junk” and thus can be engaged. A significant limitation, however, is that endoatmospheric ballistic missile defense results in a much smaller defended area.
In the 1960s there were several different systems considered for defense against ICBMs. Both the United States and the Soviet Union devised defenses, but only the Soviet Union deployed such a system, and the antiballistic missile treaty of 1972 limited it to defense of a single region (Moscow). With the increased threat from tactical ballistic missiles in the 1990s, new radar concepts were explored. One was the U.S. Army's Theater High Altitude Area Defense Ground Based Radar (THAAD GBR). This is a mobile solid-state active-aperture phased-array radar that operates within the X-band of the spectrum. A different approach to ballistic missile defense is the Israeli tactical system known as Arrow, which employs an L-band (1- to 2-GHz) active-aperture phased-array radar.
Ground-probing radar
Radar waves are usually thought of as being reflected from the surface of the ground. However, at the lower frequencies (below several hundred megahertz), radar energy can penetrate into the ground and be reflected from buried objects. The loss in propagating in the ground is very high at these frequencies, but it is low enough to permit ranges of about 3.3 to 33 feet (1 to 10 metres) or more. This is sufficient for probing the subsurface soil in order to detect underground tunnels and utility pipes and cables, to aid in archaeological digs, and to monitor the subsurface conditions of highways and bridge roadways. The short ranges require that the radar system be able to resolve closely spaced objects, which means wide-bandwidth signals must be radiated. Normally, wide bandwidth is not available at the lower frequencies (especially when a 1-foot (30-cm) range resolution requires a 500-MHz bandwidth). However, since the energy is directed into the ground rather than radiated into space, the large frequency band needed for high resolution can be obtained without serious interference to other users of the radio spectrum.
A ground-probing radar might radiate over frequencies ranging from 5 to 500 MHz in order to obtain good penetration (which requires low frequencies) with high resolution (which requires wide bandwidth). The antenna can be placed directly on the ground. Ground-probing radar units generally are small enough to be portable.
Over-the-horizon radar
 Frequencies lower than about 100 MHz usually are not desirable for radar applications. An example where lower frequencies can provide a unique and important capability is in the shortwave, or high-frequency (HF), portion of the radio band (from 3 to 30 MHz). The advantage of the HF band is that radio waves of these frequencies are refracted (bent) by the ionosphere so that the waves return to the Earth's surface at long distances beyond the horizon, as shown in the figure-->. This permits target detection at distances from about 500 to 2,000 nautical miles (900 to 3,700 km). Thus, an HF over-the-horizon (OTH) radar can detect aircraft at distances up to 10 times that of a ground-based microwave air-surveillance radar, whose range is limited by the curvature of the Earth. Besides detection and tracking of aircraft at long ranges, an HF OTH radar can be designed to detect ballistic missiles (particularly the disturbance caused by ballistic missiles as they travel through the ionosphere), ships, and weather effects over the ocean. Winds over the ocean generate waves on the water that can be recognized by HF OTH radar. From the Doppler frequency spectrum produced by echoes from the water waves, one can determine the direction of the waves generated by the wind and hence the direction of the wind itself. The strength of the waves (which indicates the state of the sea, or roughness) also can be ascertained. Timely information about the winds that drive waves over a wide expanse of the ocean can be obtained with HF OTH—obtainable only with great difficulty, if at all, by other means—which has proved valuable for weather prediction.
Frequencies lower than about 100 MHz usually are not desirable for radar applications. An example where lower frequencies can provide a unique and important capability is in the shortwave, or high-frequency (HF), portion of the radio band (from 3 to 30 MHz). The advantage of the HF band is that radio waves of these frequencies are refracted (bent) by the ionosphere so that the waves return to the Earth's surface at long distances beyond the horizon, as shown in the figure-->. This permits target detection at distances from about 500 to 2,000 nautical miles (900 to 3,700 km). Thus, an HF over-the-horizon (OTH) radar can detect aircraft at distances up to 10 times that of a ground-based microwave air-surveillance radar, whose range is limited by the curvature of the Earth. Besides detection and tracking of aircraft at long ranges, an HF OTH radar can be designed to detect ballistic missiles (particularly the disturbance caused by ballistic missiles as they travel through the ionosphere), ships, and weather effects over the ocean. Winds over the ocean generate waves on the water that can be recognized by HF OTH radar. From the Doppler frequency spectrum produced by echoes from the water waves, one can determine the direction of the waves generated by the wind and hence the direction of the wind itself. The strength of the waves (which indicates the state of the sea, or roughness) also can be ascertained. Timely information about the winds that drive waves over a wide expanse of the ocean can be obtained with HF OTH—obtainable only with great difficulty, if at all, by other means—which has proved valuable for weather prediction.An HF OTH radar might have an average power of about one megawatt and have phased-array antennas that sometimes extend several thousands of feet. This type of radar was originally developed for military purposes, especially for the surveillance of aircraft and ships over large expanses of water, where it is difficult for conventional microwave radars to provide coverage of large areas. For example, an important application of HF OTH is to provide wide-area surveillance of regions where illegal drug-carrying aircraft are suspected of operating. The area that can be held under surveillance by HF OTH radar is so large that it is difficult for aircraft to avoid detection by flying around or under its coverage. Furthermore, these counternarcotic radars can in many cases detect aircraft as they take off from a distant airfield and can sometimes follow them all the way to their destination. It is also possible in some cases to recognize specific aircraft types on the basis of the radar observation of the aircraft during takeoff and landing. The U.S. Navy's HF OTH radars known as relocatable over-the-horizon radar (ROTHR), or AN/TPS-71, have been redirected for use in drug interdiction. Such radars, located in Virginia, Texas, and Puerto Rico, provide multiple coverage of drug-traffic regions in Central America and the northern part of South America. An ROTHR can cover a 64-degree wedge-shaped area at ranges from 500 to 1,600 nautical miles (900 to 3,000 km). Its receiving antenna is an electronically steered phased-array consisting of 372 pairs of monopole antennas. The antenna extends 1.4 nautical miles (2.5 km) in length. The transmitter operates from 5 to 28 MHz with an average power of 210 kilowatts. Each radar can provide surveillance of approximately 1.3 million square nautical miles (4.5 million square km). This is much more than 10 times the area covered by a conventional surface-based long-range microwave air-surveillance radar.
History of radar
Early experiments
Serious developmental work on radar began in the 1930s, but the basic idea of radar had its origins in the classical experiments on electromagnetic radiation conducted by German physicist Heinrich Hertz (Hertz, Heinrich) during the late 1880s. Hertz set out to verify experimentally the earlier theoretical work of Scottish physicist James Clerk Maxwell (Maxwell, James Clerk). Maxwell had formulated the general equations of the electromagnetic field, determining that both light and radio waves are examples of electromagnetic waves governed by the same fundamental laws but having widely different frequencies. Maxwell's work led to the conclusion that radio waves can be reflected from metallic objects and refracted by a dielectric medium, just as light waves can. Hertz demonstrated these properties in 1888, using radio waves at a wavelength of 66 cm (which corresponds to a frequency of about 455 MHz).
The potential utility of Hertz's work as the basis for the detection of targets of practical interest did not go unnoticed at the time. In 1904 a patent for “an obstacle detector and ship navigation device,” based on the principles demonstrated by Hertz, was issued in several countries to Christian Hülsmeyer, a German engineer. Hülsmeyer built his invention and demonstrated it to the German navy but failed to arouse any interest. There was simply no economic, societal, or military need for radar until the early 1930s, when long-range military bombers capable of carrying large payloads were developed. This prompted the major countries of the world to look for a means with which to detect the approach of hostile aircraft.
Most of the countries that developed radar prior to World War II first experimented with other methods of aircraft detection. These included listening for the acoustic noise of aircraft engines and detecting the electrical noise from their ignition. Researchers also experimented with infrared sensors. None of these, however, proved effective.
First military radars
During the 1930s, efforts to use radio echoes for aircraft detection were initiated independently and almost simultaneously in eight countries that were concerned with the prevailing military situation and that already had practical experience with radio technology. The United States, Great Britain, Germany, France, the Soviet Union, Italy, The Netherlands, and Japan all began experimenting with radar within about two years of one another and embarked, with varying degrees of motivation and success, on its development for military purposes. Several of these countries had some form of operational radar equipment in military service at the start of World War II.
The first observation of the radar effect at the U.S. Naval Research Laboratory (NRL) in Washington, D.C., was made in 1922. NRL researchers positioned a radio transmitter on one shore of the Potomac River and a receiver on the other. A ship sailing on the river unexpectedly caused fluctuations in the intensity of the received signals when it passed between the transmitter and receiver. (Today such a configuration would be called bistatic radar.) In spite of the promising results of this experiment, U.S. Navy officials were unwilling to sponsor further work.
The principle of radar was “rediscovered” at NRL in 1930 when L.A. Hyland observed that an aircraft flying through the beam of a transmitting antenna caused a fluctuation in the received signal. Although Hyland and his associates at NRL were enthusiastic about the prospect of detecting targets by radio means and were eager to pursue its development in earnest, little interest was shown by higher authorities in the navy. Not until it was learned how to use a single antenna for both transmitting and receiving (now termed monostatic radar) was the value of radar for detecting and tracking aircraft and ships fully recognized. Such a system was demonstrated at sea on the battleship USS New York in early 1939.
The first radars developed by the U.S. Army were the SCR-268 (at a frequency of 205 MHz) for controlling antiaircraft gunfire and the SCR-270 (at a frequency of 100 MHz) for detecting aircraft. Both of these radars were available at the start of World War II, as was the navy's CXAM shipboard surveillance radar (at a frequency of 200 MHz). It was an SCR-270, one of six available in Hawaii at the time, that detected the approach of Japanese warplanes toward Pearl Harbor (Pearl Harbor attack), near Honolulu, on December 7, 1941; however, the significance of the radar observations was not appreciated until bombs began to fall.
Britain (United Kingdom) commenced radar research for aircraft detection in 1935. The British government encouraged engineers to proceed rapidly because it was quite concerned about the growing possibility of war. By September 1938 the first British radar system, the Chain Home, had gone into 24-hour operation, and it remained operational throughout the war. The Chain Home radars allowed Britain to deploy successfully its limited air defenses against the heavy German air attacks conducted during the early part of the war. They operated at about 30 MHz—in what is called the shortwave, or HF, band—which is actually quite a low frequency for radar. It might not have been the optimum solution, but the inventor of British radar, Sir Robert Watson-Watt (Watson-Watt, Sir Robert Alexander), believed that something that worked and was available was better than an ideal solution that was only a promise or might arrive too late.
The Soviet Union (Union of Soviet Socialist Republics) also started working on radar during the 1930s. At the time of the German attack on their country in June 1941, the Soviets had developed several different types of radars and had in production an aircraft-detection radar that operated at 75 MHz (in the very-high-frequency 【VHF】 band). Their development and manufacture of radar equipment was disrupted by the German invasion, and the work had to be relocated.
At the beginning of World War II, Germany had progressed farther in the development of radar than any other country. The Germans employed radar on the ground and in the air for defense against Allied bombers. Radar was installed on a German pocket battleship as early as 1936. Radar development was halted by the Germans in late 1940 because they believed the war was almost over. The United States and Britain, however, accelerated their efforts. By the time the Germans realized their mistake, it was too late to catch up.
Except for some German radars that operated at 375 and 560 MHz, all of the successful radar systems developed prior to the start of World War II were in the VHF band, below about 200 MHz. The use of VHF posed several problems. First, VHF beamwidths are broad. (Narrow beamwidths yield greater accuracy, better resolution, and the exclusion of unwanted echoes from the ground or other clutter.) Second, the VHF portion of the electromagnetic spectrum does not permit the wide bandwidths required for the short pulses that allow for greater accuracy in range determination. Third, VHF is subject to atmospheric noise, which limits receiver sensitivity. In spite of these drawbacks, VHF represented the frontier of radio technology in the 1930s, and radar development at this frequency range constituted a genuine pioneering accomplishment. It was well understood by the early developers of radar that operation at even higher frequencies was desirable, particularly since narrow beamwidths could be achieved without excessively large antennas.
Advances during World War II
The opening of higher frequencies (those of the microwave region) to radar, with its attendant advantages, came about in late 1939 when the cavity magnetron oscillator was invented by British physicists at the University of Birmingham. In 1940 the British generously disclosed to the United States the concept of the magnetron, which then became the basis for work undertaken by the newly formed Massachusetts Institute of Technology (MIT) Radiation Laboratory at Cambridge. It was the magnetron that made microwave radar a reality in World War II.
The successful development of innovative and important microwave radars at the MIT Radiation Laboratory has been attributed to the urgency for meeting new military capabilities as well as to the enlightened and effective management of the laboratory and the recruitment of talented, dedicated scientists. More than 100 different radar systems were developed as a result of the laboratory's program during the five years of its existence (1940–45).
One of the most notable microwave radars developed by the MIT Radiation Laboratory was the SCR-584, a widely used gunfire-control system. It employed conical scan tracking—in which a single offset (squinted) radar beam is continuously rotated about the radar antenna's central axis—and, with its four-degree beamwidth, it had sufficient angular accuracy to place antiaircraft guns on target without the need for searchlights or optics, as was required for older radars with wider beamwidths (such as the SCR-268). The SCR-584 operated in the frequency range from 2.7 to 2.9 GHz (known as the S band) and had a parabolic reflector antenna with a diameter of nearly 6.6 feet (2 metres). It was first used in combat early in 1944 on the Anzio beachhead in Italy. Its introduction was timely, since the Germans by that time had learned how to jam its predecessor, the SCR-268. The introduction of the SCR-584 microwave radar caught the Germans unprepared.
Postwar progress
After the war, progress in radar technology slowed considerably. The last half of the 1940s was devoted principally to developments initiated during the war. Two of these were the monopulse tracking radar and the moving-target indication (MTI) radar (discussed in the section Doppler frequency and target velocity (radar)). It required many more years of development to bring these two radar techniques to full capability.
New and better radar systems emerged during the 1950s. One of these was a highly accurate monopulse tracking radar designated the AN/FPS-16, which was capable of an angular accuracy of about 0.1 milliradian (roughly 0.006 degree). There also appeared large, high-powered radars designed to operate at 220 MHz ( VHF) and 450 MHz ( UHF). These systems, equipped with large mechanically rotating antennas (more than 120 feet 【37 metres】 in horizontal dimension), could reliably detect aircraft at very long ranges. Another notable development was the klystron amplifier, which provided a source of stable high power for very-long-range radars. Synthetic aperture radar first appeared in the early 1950s, but it took almost 30 more years to reach a high state of development, with the introduction of digital processing and other advances. The airborne pulse Doppler radar also was introduced in the late 1950s in the Bomarc air-to-air missile.
The decade of the 1950s also saw the publication of important theoretical concepts that helped put radar design on a more quantitative basis. These included the statistical theory of detection of signals in noise; the so-called matched filter theory, which showed how to configure a radar receiver to maximize detection of weak signals; the Woodward ambiguity diagram, which made clear the trade-offs in waveform design for good range and radial velocity measurement and resolution; and the basic methods for Doppler filtering in MTI radars, which later became important when digital technology allowed the theoretical concepts to become a practical reality.
The Doppler frequency shift and its utility for radar were known before World War II, but it took years of development to achieve the technology necessary for wide-scale adoption. Serious application of the Doppler principle to radar began in the 1950s, and today the principle has become vital in the operation of many radar systems. As previously explained, the Doppler frequency shift of the reflected signal results from the relative motion between the target and the radar. Use of the Doppler frequency is indispensable in continuous wave, MTI, and pulse Doppler radars, which must detect moving targets in the presence of large clutter echoes. The Doppler frequency shift is the basis for police radar guns. SAR and ISAR imaging radars make use of Doppler frequency to generate high-resolution images of terrain and targets. The Doppler frequency shift also has been used in Doppler-navigation radar to measure the velocity of the aircraft carrying the radar system. The extraction of the Doppler shift in weather radars, moreover, allows the identification of severe storms and dangerous wind shear not possible by other techniques.
The first large electronically steered phased-array radars were put into operation in the 1960s. Airborne MTI radar for aircraft detection was developed for the U.S. Navy's Grumman E-2 airborne-early-warning (AEW) aircraft at this time. Many of the attributes of HF over-the-horizon radar were demonstrated during the 1960s, as were the first radars designed for detecting ballistic missiles and satellites.
Radar in the digital age
During the 1970s digital (digital computer) technology underwent a tremendous advance, which made practical the signal and data processing (information processing) required for modern radar. Significant advances also were made in airborne pulse Doppler radar, greatly enhancing its ability to detect aircraft in the midst of heavy ground clutter. The U.S. Air Force's airborne-warning-and-control-system (AWACS) radar and military airborne-intercept radar depend on the pulse Doppler principle. It might be noted too that radar began to be used in spacecraft for remote sensing of the environment during the 1970s.
Over the next decade radar methods evolved to a point where radars were able to distinguish one type of target from another. Serial production of phased-array radars for air defense (the Patriot and Aegis systems), airborne bomber radar (B-1B aircraft), and ballistic missile detection (Pave Paws) also became feasible during the 1980s. Advances in remote sensing made it possible to measure winds blowing over the sea, the geoid (or mean sea level), ocean roughness, ice conditions, and other environmental effects. Solid-state technology and integrated microwave circuitry permitted new radar capabilities that had been only academic curiosities a decade or two earlier.
Continued advances in computer technology in the 1990s allowed increased information about the nature of targets and the environment to be obtained from radar echoes. The introduction of Doppler weather radar systems (as, for example, Nexrad), which measure the radial component of wind speed as well as the rate of precipitation, provided new hazardous-weather warning capability. Terminal Doppler weather radars (TDWR) were installed at or near major airports to warn of dangerous wind shear during takeoff and landing. Unattended radar operation with little downtime for repairs was demanded of manufacturers for such applications as air traffic control. HF over-the-horizon radar systems were operated by several countries, primarily for the detection of aircraft at very long ranges (out to 2,000 nautical miles 【3,700 km】). Space-based radars continued to gather information about the Earth's land and sea surfaces on a global basis. Improved imaging radar systems were carried by space probes (space exploration) to obtain higher-resolution three-dimensional images of the surface of Venus, penetrating for the first time its ever-present opaque cloud cover.
The first ballistic missile defense radars were conceived and developed in the mid-1950s and 1960s. Development in the United States stopped, however, with the signing in 1972 of the antiballistic missile (ABM) treaty by the Soviet Union and the United States. The use of tactical ballistic missiles during the Persian Gulf War (1990–91) brought back the need for radars for defense against such missiles. Russia (and before that, the Soviet Union) continually enhanced its powerful radar-based air-defense systems to engage tactical ballistic missiles. The Israelis deployed the Arrow phased-array radar as part of an ABM system to defend their homeland. The United States developed a mobile active-aperture (all solid-state) phased-array called Theater High Altitude Area Defense Ground Based Radar (THAAD GBR) for use in a theatrewide ABM system.
Advances in digital technology in the first decade of the 21st century sparked further improvement in signal and data processing, with the goal of developing (almost) all-digital phased-array radars. High-power transmitters became available for radar application in the millimetre-wave portion of the spectrum (typically 94 GHz), with average powers 100 to 1,000 times greater than previously.
Additional Reading
Complete basic information on all forms of radar is presented in Merrill I. Skolnik, Introduction to Radar Systems, 3rd ed. (2001); and Merrill I. Skolnik (ed.), Radar Handbook, 2nd ed. (1990), a comprehensive reference work written for radar engineers, covering the various aspects of radar technology. George W. Stimson, Introduction to Airborne Radar, 2nd ed. (1998), explains the fundamentals that apply to any radar system and describes the use of radars in military aircraft. S.S. Swords, Technical History of the Beginnings of Radar (1986), surveys developments prior to World War II, focusing on early European achievements. Henry E. Guerlac, Radar in World War II, 2 vol. (1987), is an excellent, authoritative history written by a professional historian with a background in science. Merrill I. Skolnik (ed.), Radar Applications (1988), is a collection of technical papers describing the various applications of radar, such as air traffic control, military air defense, aircraft and spacecraft surveillance, and remote sensing of the environment. David K. Barton, Modern Radar System Analysis (1988), provides a fine technical presentation of many aspects of radar design.
- Saint Adamnan
- Saint Adelaide
- Saint Adrian III
- Saint Aelfheah
- Saint Aelred of Rievaulx
- Saint-Affrique
- Saint Agapetus I
- Saint Agatha
- Saint Agatho
- Saint Agnes
- Saint Agobard
- Saint Aidan
- Saint Alban
- Saint Albans
- Saint Albans, battles of
- Saint Albans, Charles Beauclerk, 1st duke of, Baron Heddington, earl of Burford
- Saint Albans, Henry Jermyn, Earl of, 1st Baron Jermyn of Saint Edmundsbury
- Saint Albans Raid
- Saint Albert
- Saint Albertus Magnus
- Saint Alexander I
- Saint Alexander Nevsky
- Saint Alexis
- Saint Alfonso Maria de' Liguori
- Saint Aloysius Gonzaga