telephone
Introduction
 an instrument designed for the simultaneous transmission and reception of the human voice. The telephone is inexpensive, is simple to operate, and offers its users an immediate, personal type of communication that cannot be obtained through any other medium. As a result, it has become the most widely used telecommunications device in the world. Billions of telephone sets are in use around the world.
an instrument designed for the simultaneous transmission and reception of the human voice. The telephone is inexpensive, is simple to operate, and offers its users an immediate, personal type of communication that cannot be obtained through any other medium. As a result, it has become the most widely used telecommunications device in the world. Billions of telephone sets are in use around the world. This article describes the functional components of the modern telephone and traces the historical development of the telephone instrument. In addition it describes the development of what is known as the public switched telephone network (PSTN). For discussion of broader technologies, see the articles telecommunications system (telecommunication) and telecommunications media. For technologies related to the telephone, see the articles mobile telephone, videophone, fax and modem.
This article describes the functional components of the modern telephone and traces the historical development of the telephone instrument. In addition it describes the development of what is known as the public switched telephone network (PSTN). For discussion of broader technologies, see the articles telecommunications system (telecommunication) and telecommunications media. For technologies related to the telephone, see the articles mobile telephone, videophone, fax and modem.The telephone instrument
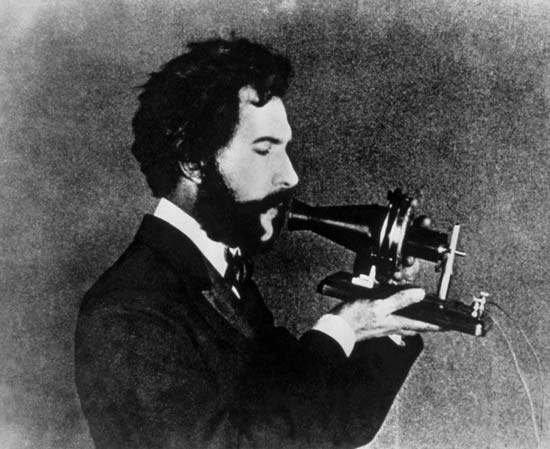
 The word telephone, from the Greek roots tēle, “far,” and phonē, “sound,” was applied as early as the late 17th century to the string telephone familiar to children, and it was later used to refer to the megaphone and the speaking tube, but in modern usage it refers solely to electrical devices derived from the inventions of Alexander Graham Bell (Bell, Alexander Graham) and others. Within 20 years of the 1876 Bell patent, the telephone instrument, as modified by Thomas Watson (Watson, Thomas Augustus), Emil Berliner (Berliner, Emil), Thomas Edison (Edison, Thomas Alva), and others, acquired a functional design that has not changed fundamentally in more than a century. Since the invention of the transistor in 1947, metal wiring and other heavy hardware have been replaced by lightweight and compact microcircuitry. Advances in electronics have improved the performance of the basic design, and they also have allowed the introduction of a number of “smart” features such as automatic redialing, call-number identification, wireless transmission, and visual data display. Such advances supplement, but do not replace, the basic telephone design. That design is described in this section, as is the remarkable history of the telephone's development, from the earliest experimental devices to the modern digital instrument.
The word telephone, from the Greek roots tēle, “far,” and phonē, “sound,” was applied as early as the late 17th century to the string telephone familiar to children, and it was later used to refer to the megaphone and the speaking tube, but in modern usage it refers solely to electrical devices derived from the inventions of Alexander Graham Bell (Bell, Alexander Graham) and others. Within 20 years of the 1876 Bell patent, the telephone instrument, as modified by Thomas Watson (Watson, Thomas Augustus), Emil Berliner (Berliner, Emil), Thomas Edison (Edison, Thomas Alva), and others, acquired a functional design that has not changed fundamentally in more than a century. Since the invention of the transistor in 1947, metal wiring and other heavy hardware have been replaced by lightweight and compact microcircuitry. Advances in electronics have improved the performance of the basic design, and they also have allowed the introduction of a number of “smart” features such as automatic redialing, call-number identification, wireless transmission, and visual data display. Such advances supplement, but do not replace, the basic telephone design. That design is described in this section, as is the remarkable history of the telephone's development, from the earliest experimental devices to the modern digital instrument.Working components of the telephone
As it has since its early years, the telephone instrument is made up of the following functional components: a power source, a switch hook, a dialer, a ringer, a transmitter, a receiver, and an anti-sidetone circuit. These components are described in turn below.
Power source
 In the first experimental telephones the electric current that powered the telephone circuit was generated at the transmitter, by means of an electromagnet activated by the speaker's voice. Such a system could not generate enough voltage to produce audible speech in distant receivers, so every transmitter since Bell's patented design has operated on a direct current supplied by an independent power source. The first sources were batteries (battery) located in the telephone instruments themselves, but since the 1890s current has been generated at the local switching office. The current is supplied through a two-wire circuit called the local loop. The standard voltage is 48 volts.
In the first experimental telephones the electric current that powered the telephone circuit was generated at the transmitter, by means of an electromagnet activated by the speaker's voice. Such a system could not generate enough voltage to produce audible speech in distant receivers, so every transmitter since Bell's patented design has operated on a direct current supplied by an independent power source. The first sources were batteries (battery) located in the telephone instruments themselves, but since the 1890s current has been generated at the local switching office. The current is supplied through a two-wire circuit called the local loop. The standard voltage is 48 volts.Cordless telephones represent a return to individual power sources in that their low-wattage radio transmitters are powered by a small (e.g., 3.6-volt) battery located in the portable handset. When the telephone is not in use, the battery is recharged through contacts with the base unit. The base unit is powered by a transformer connection to a standard electric outlet.
Switch hook
 The switch hook connects the telephone instrument to the direct current supplied through the local loop. In early telephones the receiver was hung on a hook that operated the switch by opening and closing a metal contact. This system is still common, though the hook has been replaced by a cradle to hold the combined handset, enclosing both receiver and transmitter. In some modern electronic instruments, the mechanical operation of metal contacts has been replaced by a system of transistor relays (relay).
The switch hook connects the telephone instrument to the direct current supplied through the local loop. In early telephones the receiver was hung on a hook that operated the switch by opening and closing a metal contact. This system is still common, though the hook has been replaced by a cradle to hold the combined handset, enclosing both receiver and transmitter. In some modern electronic instruments, the mechanical operation of metal contacts has been replaced by a system of transistor relays (relay). When the telephone is “on hook,” contact with the local loop is broken. When it is “off hook” (i.e., when the handset is lifted from the cradle), contact is restored, and current flows through the loop. The switching office signals restoration of contact by transmitting a low-frequency “dial tone”—actually two simultaneous tones of 350 and 440 hertz.
When the telephone is “on hook,” contact with the local loop is broken. When it is “off hook” (i.e., when the handset is lifted from the cradle), contact is restored, and current flows through the loop. The switching office signals restoration of contact by transmitting a low-frequency “dial tone”—actually two simultaneous tones of 350 and 440 hertz.Dialer
The dialer is used to enter the number of the party that the user wishes to call. Signals generated by the dialer activate switches in the local office, which establish a transmission path to the called party. Dialers are of the rotary and push-button types.
The traditional rotary dialer, invented in the 1890s, is rotated against the tension of a spring and then released, whereupon it returns to its position at a rate controlled by a mechanical governor. The return rotation causes a switch to open and close, producing interruptions, or pulses, in the flow of direct current to the switching office. Each pulse lasts approximately one-tenth of a second; the number of pulses signals the number being dialed.
In push-button dialing, introduced in the 1960s, the pressing of each button generates a “dual-tone” signal that is specific to the number being entered. Each dual tone is composed of a low frequency (697, 770, 852, or 941 hertz) and a high frequency (1,209, 1,336, or 1,477 hertz), which are sensed and decoded at the switching office. Unlike the low-frequency rotary pulses, dual tones can travel through the telephone system, so that push-button telephones can be used to activate automated functions at the other end of the line.
In both rotary and push-button systems, a capacitor and resistor prevent dialing signals from passing into the ringer circuit.
Ringer
The ringer alerts the user to an incoming call by emitting an audible tone or ring. Ringers are of two types, mechanical or electronic. Both types are activated by a 20-hertz, 75-volt alternating current generated by the switching office. The ringer is activated in two-second pulses, each pulse separated by a pause of four seconds.
The traditional mechanical ringer was introduced with the early Bell telephones. It consists of two closely spaced bells, a metal clapper, and a magnet. Passage of alternating current through a coil of wire produces alternations in the magnetic attraction exerted on the clapper, so that it vibrates rapidly and loudly against the bells. Volume can be muted by a switch that places a mechanical damper against the bells.
In modern electronic ringers, introduced in the 1980s, the ringer current is passed through an oscillator, which adjusts the current to the precise frequency required to activate a piezoelectric transducer—a device made of a crystalline material that vibrates in response to an electric current. The transducer may be coupled to a small loudspeaker, which can be adjusted for volume.
The ringer circuit remains connected to the local loop even when the telephone is on hook. A larger voltage is necessary to activate the ringer because the ringer circuit is made with a high electrical impedance in order to avoid draining power from the transmitter-receiver circuit when the telephone is in use. A capacitor prevents direct current from passing through the ringer once the handset has been lifted off the switch hook.
Transmitter
The transmitter is essentially a tiny microphone located in the mouthpiece of the telephone's handset. It converts the vibrations of the speaker's voice into variations in the direct current flowing through the set from the power source.
In traditional carbon transmitters, developed in the 1880s, a thin layer of carbon granules separates a fixed electrode from a diaphragm-activated electrode. Electric current flows through the carbon against a certain resistance. The diaphragm, vibrating in response to the speaker's voice, forces the movable electrode to exert a fluctuating pressure on the carbon layer. Fluctuations in the carbon layer create fluctuations in its electrical resistance, which in turn produce fluctuations in the electric current.
In modern electret transmitters, developed in the 1970s, the carbon layer is replaced by a thin plastic sheet that has been given a conductive metallic coating on one side. The plastic separates that coating from another metal electrode and maintains an electric field between them. Vibrations caused by speech produce fluctuations in the electric field, which in turn produce small variations in voltage. The voltages are amplified for transmission over the telephone line.
Receiver
The receiver is located in the earpiece of the telephone's handset. Operating on electromagnetic principles that were known in Bell's day, it converts fluctuating electric current into sound waves that reproduce human speech. Fundamentally, it consists of two parts: a permanent magnet, having pole pieces wound with coils of insulated fine wire, and a diaphragm driven by magnetic material that is supported near the pole pieces. Speech currents passing through the coils vary the attraction of the permanent magnet for the diaphragm, causing it to vibrate and produce sound waves.
Through the years the design of the electromagnetic system has been continuously improved. In the most common type of receiver, introduced in the Bell system in 1951, the diaphragm, consisting of a central cone attached to a ring-shaped armature, is driven as a piston to obtain efficient response over a wide frequency range. Telephone receivers are designed to have an accurate response to tones with frequencies of 350 to 3,500 hertz—a dynamic range that is narrower than the capabilities of the human ear but sufficient to reproduce normal speech.
Anti-sidetone circuit
The anti-sidetone circuit is an assemblage of transformers, resistors, and capacitors that perform a number of functions. The primary function is to reduce sidetone, which is the distracting sound of the speaker's own voice coming through the receiver from the transmitter. The anti-sidetone circuit accomplishes this reduction by interposing a transformer between the transmitter circuit and the receiver circuit and by splitting the transmitter signals along two paths. When the divided signals, having opposite polarities, meet at the transformer, they almost entirely cancel each other in crossing to the receiver circuit. The speech signal coming from the other end of the line, on the other hand, arrives at the transformer along a single, undivided path and crosses the transformer unimpeded.
The anti-sidetone circuit also matches the low electrical impedance of the telephone instrument's circuits to the higher electrical impedance of the telephone line. Impedance matching allows a more efficient flow of current through the system.
Development of the telephone instrument
Early sound transmitters
Beginning in the early 19th century, several inventors made a number of attempts to transmit sound by electric means. The first inventor to suggest that sound could be transmitted electrically was a Frenchman, Charles Bourseul, who indicated that a diaphragm making and breaking contact with an electrode might be used for this purpose. By 1861 Johann Philipp Reis (Reis, Johann Philipp) of Germany had designed several instruments for the transmission of sound. The transmitter Reis employed consisted of a membrane with a metallic strip that would intermittently contact a metallic point connected to an electrical circuit. As sound waves impinged on the membrane, making the membrane vibrate, the circuit would be connected and interrupted at the same rate as the frequency of the sound. The fluctuating electric current thus generated would be transmitted by wire to a receiver, which consisted of an iron needle that was surrounded by the coil of an electromagnet and connected to a sounding box. The fluctuating electric current would generate varying magnetic fields (magnetic field) in the coil, and these in turn would force the iron needle to produce vibrations in the sounding box. Reis's system could thus transmit a simple tone, but it could not reproduce the complex waveforms that make up speech.
Gray and Bell: the transmission of speech
The first devices
In the 1870s two American inventors, Elisha Gray (Gray, Elisha) and Alexander Graham Bell (Bell, Alexander Graham), each independently, designed devices that could transmit speech electrically. Gray's first device made use of a harmonic telegraph, the transmitter and receiver of which consisted of a set of metallic reeds tuned to different frequencies. An electromagnetic coil was located near each of the reeds. When a reed in the transmitter was vibrated by sound waves of its resonant frequency—for example, 400 hertz—it induced an electric current of corresponding frequency in its matching coil. This coil was connected to all the coils in the receiver, but only the reed tuned to the transmitting reed's frequency would vibrate in response to the electric current. Thus, simple tones could be transmitted. In the spring of 1874 Gray realized that a receiver consisting of a single steel diaphragm in front of an electromagnet could reproduce any of the transmitted tones. Gray, however, was initially unable to conceive of a transmitter that would transmit complex speech vibrations and instead chose to demonstrate the transmission of tones via his telegraphic device in the summer of 1874.
 Bell, meanwhile, also had considered the transmission of speech using the harmonic telegraph concept, and in the summer of 1874 he conceived of a membrane receiver similar to Gray's. However, since Bell too had no transmitter, the membrane device was never constructed. Following some earlier experiments, Bell postulated that, if two membrane receivers were connected electrically, a sound wave that caused one membrane to vibrate would induce a voltage in the electromagnetic coil that would in turn cause the other membrane to vibrate. Working with a young machinist, Thomas Augustus Watson (Watson, Thomas Augustus), Bell had two such instruments constructed in June 1875. The device was tested on June 3, 1875, and, although no intelligible words were transmitted, “speechlike” sounds were heard at the receiving end.
Bell, meanwhile, also had considered the transmission of speech using the harmonic telegraph concept, and in the summer of 1874 he conceived of a membrane receiver similar to Gray's. However, since Bell too had no transmitter, the membrane device was never constructed. Following some earlier experiments, Bell postulated that, if two membrane receivers were connected electrically, a sound wave that caused one membrane to vibrate would induce a voltage in the electromagnetic coil that would in turn cause the other membrane to vibrate. Working with a young machinist, Thomas Augustus Watson (Watson, Thomas Augustus), Bell had two such instruments constructed in June 1875. The device was tested on June 3, 1875, and, although no intelligible words were transmitted, “speechlike” sounds were heard at the receiving end. An application for a U.S. patent on Bell's work was filed on Feb. 14, 1876. Several hours later that same day, Gray filed a caveat on the concept of a telephone transmitter and receiver. A caveat was a confidential, formal declaration by an inventor to the U.S. Patent Office of an intent to file a patent on an idea yet to be perfected; it was intended to prevent the idea from being used by other inventors. At this point neither Gray nor Bell had yet constructed a working telephone that could convey speech. On the basis of its earlier filing time, Bell's patent application was allowed over Gray's caveat. On March 7, 1876, Bell was awarded U.S. patent 174,465. This patent is often referred to as the most valuable ever issued by the U.S. Patent Office, as it described not only the telephone instrument but also the concept of a telephone system.
An application for a U.S. patent on Bell's work was filed on Feb. 14, 1876. Several hours later that same day, Gray filed a caveat on the concept of a telephone transmitter and receiver. A caveat was a confidential, formal declaration by an inventor to the U.S. Patent Office of an intent to file a patent on an idea yet to be perfected; it was intended to prevent the idea from being used by other inventors. At this point neither Gray nor Bell had yet constructed a working telephone that could convey speech. On the basis of its earlier filing time, Bell's patent application was allowed over Gray's caveat. On March 7, 1876, Bell was awarded U.S. patent 174,465. This patent is often referred to as the most valuable ever issued by the U.S. Patent Office, as it described not only the telephone instrument but also the concept of a telephone system.The search for a successful transmitter
 Gray had earlier come up with an idea for a transmitter in which a moving membrane was attached to an electrically conductive rod immersed in an acidic solution. Another conductive rod was immersed in the solution, and, as sound waves impinged on the membrane, the two rods would move with respect to each other. Variations in the distance between the two rods would produce variations in electric resistance and, hence, variations in the electric current. In contrast to the magnetic coil type of transmitter, the variable-resistance transmitter could actually amplify the transmitted sound, permitting use of longer cables between the transmitter and the receiver.
Gray had earlier come up with an idea for a transmitter in which a moving membrane was attached to an electrically conductive rod immersed in an acidic solution. Another conductive rod was immersed in the solution, and, as sound waves impinged on the membrane, the two rods would move with respect to each other. Variations in the distance between the two rods would produce variations in electric resistance and, hence, variations in the electric current. In contrast to the magnetic coil type of transmitter, the variable-resistance transmitter could actually amplify the transmitted sound, permitting use of longer cables between the transmitter and the receiver. Again, Bell also worked on a similar “liquid” transmitter design; it was this design that permitted the first transmission of speech, on March 10, 1876, by Bell to Watson: “Mr. Watson, come here. I want you.” The first public demonstrations of the telephone followed shortly afterward, featuring a design similar to the earlier magnetic coil membrane units described above. One of the earliest demonstrations occurred in June 1876 at the Centennial Exposition in Philadelphia. Further tests and refinement of equipment followed shortly afterward. On Oct. 9, 1876 Bell conducted a two-way test of his telephone over a five-km (two-mile) distance between Boston and Cambridgeport, Mass. In May 1877 the first commercial application of the telephone took place with the installation of telephones in offices of customers of the E.T. Holmes burglar alarm company.
Again, Bell also worked on a similar “liquid” transmitter design; it was this design that permitted the first transmission of speech, on March 10, 1876, by Bell to Watson: “Mr. Watson, come here. I want you.” The first public demonstrations of the telephone followed shortly afterward, featuring a design similar to the earlier magnetic coil membrane units described above. One of the earliest demonstrations occurred in June 1876 at the Centennial Exposition in Philadelphia. Further tests and refinement of equipment followed shortly afterward. On Oct. 9, 1876 Bell conducted a two-way test of his telephone over a five-km (two-mile) distance between Boston and Cambridgeport, Mass. In May 1877 the first commercial application of the telephone took place with the installation of telephones in offices of customers of the E.T. Holmes burglar alarm company.The poor performance of early telephone transmitters prompted a number of inventors to pursue further work in this area. Among them was Thomas Alva Edison (Edison, Thomas Alva), whose 1886 design for a voice transmitter consisted of a cavity filled with granules of carbonized anthracite coal. The carbon granules were confined between two electrodes (electrode) through which a constant electric current was passed. One of the electrodes was attached to a thin iron diaphragm, and, as sound waves forced the diaphragm to vibrate, the carbon granules were alternately compressed and released. As the distance across the granules fluctuated, resistance to the electric current also fluctuated, and the resulting variations in current were transmitted to the receiver. Edison's carbon transmitter was sufficiently simple, effective, cheap, and durable that it became the basis for standard telephone transmitter design through the 1970s.
Development of the modern instrument

 The telephone instrument continued to evolve over time, as can be illustrated by the succession of American instruments described below. The concept of mounting both the transmitter and the receiver in the same handle appeared in 1878 in instruments designed for use by telephone operators in a New York City exchange. The earliest telephone instrument to see common use was introduced by Charles Williams, Jr., in 1882. Designed for wall mounting, this instrument consisted of a ringer, a hand-cranked magneto (for generating a ringing voltage in a distant instrument), a hand receiver, a switch hook, and a transmitter. Various versions of this telephone instrument remained in use throughout the United States as late as the 1950s. As is noted in the section Switching (telephone), the telephone dial originated with automatic telephone switching systems in 1896.
The telephone instrument continued to evolve over time, as can be illustrated by the succession of American instruments described below. The concept of mounting both the transmitter and the receiver in the same handle appeared in 1878 in instruments designed for use by telephone operators in a New York City exchange. The earliest telephone instrument to see common use was introduced by Charles Williams, Jr., in 1882. Designed for wall mounting, this instrument consisted of a ringer, a hand-cranked magneto (for generating a ringing voltage in a distant instrument), a hand receiver, a switch hook, and a transmitter. Various versions of this telephone instrument remained in use throughout the United States as late as the 1950s. As is noted in the section Switching (telephone), the telephone dial originated with automatic telephone switching systems in 1896.

 desk instruments were first constructed in 1897. Patterned after the wall-mounted telephone, they usually consisted of a separate receiver and transmitter. In 1927, however, the American Telephone & Telegraph Company (AT&T (AT&T Corporation)) introduced the E1A handset, which employed a combined transmitter-receiver arrangement. The ringer and much of the telephone electronics remained in a separate box, on which the transmitter-receiver handle was cradled when not in use. The first telephone to incorporate all the components of the station apparatus into one instrument was the so-called combined set of 1937. Some 25 million of these instruments were produced until they were superseded by a new design in 1949. The 1949 telephone was totally new, incorporating significant improvements in audio quality, mechanical design, and physical construction. Push-button versions of this set became available in 1963.
desk instruments were first constructed in 1897. Patterned after the wall-mounted telephone, they usually consisted of a separate receiver and transmitter. In 1927, however, the American Telephone & Telegraph Company (AT&T (AT&T Corporation)) introduced the E1A handset, which employed a combined transmitter-receiver arrangement. The ringer and much of the telephone electronics remained in a separate box, on which the transmitter-receiver handle was cradled when not in use. The first telephone to incorporate all the components of the station apparatus into one instrument was the so-called combined set of 1937. Some 25 million of these instruments were produced until they were superseded by a new design in 1949. The 1949 telephone was totally new, incorporating significant improvements in audio quality, mechanical design, and physical construction. Push-button versions of this set became available in 1963. Modern telephone instruments are largely electronic (electronics). Wire coils that performed multiple functions in older sets have been replaced by integrated circuits (integrated circuit) that are powered by the line voltage. Mechanical bell ringers have given way to electronic ringers. The carbon transmitter dating from Edison's time has been replaced by electret microphones, in which sound waves cause a thin, metal-coated plastic diaphragm to vibrate, producing variations in an electric field across a tiny air gap between the diaphragm and an electrode. The telephone dial has given way to the keypad, which can usually be switched to generate either pulses similar to those of the dial mechanism or dual-tone signals as in AT&T's Touch-Tone system. Finally, a number of other features have become available on the telephone instrument, including last-number recall and speed-dialing of multiple telephone numbers.
Modern telephone instruments are largely electronic (electronics). Wire coils that performed multiple functions in older sets have been replaced by integrated circuits (integrated circuit) that are powered by the line voltage. Mechanical bell ringers have given way to electronic ringers. The carbon transmitter dating from Edison's time has been replaced by electret microphones, in which sound waves cause a thin, metal-coated plastic diaphragm to vibrate, producing variations in an electric field across a tiny air gap between the diaphragm and an electrode. The telephone dial has given way to the keypad, which can usually be switched to generate either pulses similar to those of the dial mechanism or dual-tone signals as in AT&T's Touch-Tone system. Finally, a number of other features have become available on the telephone instrument, including last-number recall and speed-dialing of multiple telephone numbers.Cordless telephones
Cordless telephones are devices that take the place of a telephone instrument within a home or office and permit very limited mobility—up to a hundred metres. Because they communicate with a base unit that is plugged directly into an existing telephone jack, they essentially serve as a wireless extension to existing home or office wiring. The first cordless phones employed analog modulation methods and operated over a pair of frequencies, 1.7 megahertz and 49 megahertz. Beginning in the 1980s, cordless phones operated over a pair of frequencies in the 46- and 49-megahertz bands, and in the late 1990s phones operating in the 902–928-megahertz band began to appear. These phones employed either analog modulation, digital modulation, or spread-spectrum modulation. Some digital cordless telephones now operate in the gigahertz region—for example, 5.8 gigahertz. Generally speaking, each successive generation of cordless phones has offered improved quality and range to the consumer.
Personal communication systems
In a number of countries throughout the world, a wireless service called the personal communication system (PCS) is available. In the broadest sense, PCS includes all forms of wireless communication that are interconnected with the public switched telephone network, including mobile telephone and aeronautical public correspondence systems, but the basic concept includes the following attributes: ubiquitous service to roving users, low subscriber terminal costs and service fees, and compact, lightweight, and unobtrusive personal portable units.
The first PCS to be implemented was the second-generation cordless telephony (CT-2) system, which entered service in the United Kingdom in 1991. The CT-2 system was designed at the outset to serve as a telepoint system. In telepoint systems, a user of a portable unit might originate telephone calls (but not receive them) by dialing a base station located within several hundred metres. The base unit was connected to the PSTN and operated as a public (pay) telephone, charging calls to the subscriber. Because of its limited coverage, the CT-2 system went out of service, giving way to the popular GSM digital cellular system (see mobile telephone).
Meanwhile, the European Conference on Posts and Telecommunications (CEPT) had begun work on another personal communication system, known as DECT (Digital Enhanced Cordless Telecommunications, formerly Digital European Cordless Telephone). The DECT system was designed initially to provide cordless telephone service for office environments, but its scope soon broadened to include campus-wide communications and telepoint services. By 1999 DECT had reached 50 percent of the European cordless market.
In Japan a PCS based loosely on the DECT concepts, the Personal Handy-Phone System (PHS), was introduced to the public in 1994. The PHS became popular throughout urban areas as an alternative to cellular systems. Supporting data traffic at 32 and 64 kilobits per second, it could perform as a high-speed wireless modem for access to the Internet.
In the United States in 1994–95 the Federal Communications Commission (FCC) sold a number of licenses in the 1.85–1.99-gigahertz region for use in PCS applications.
The telephone network
In order to understand the many concepts represented in the public switched telephone network (PSTN), it is helpful to review the processes that take place in the making of a single call on a traditional wired telephone. To make a call, a telephone subscriber begins by taking the telephone “off-hook”—in the process, signaling the local central office that service is requested. The central office, which has been monitoring the telephone line continuously (a process known as attending), responds with a dial tone. Upon receiving the dial tone, the customer enters the called party's telephone number. The central office stores the entered number, translates the number into an equipment location and a path to that location, and tests whether the called party's line is already in use (or “busy”). The called party's number may lie in the same central office (in which case the call is designated intraoffice), or it may lie in another central office (requiring an interoffice call). If the call is intraoffice, the central office switch will handle the entire call process. If the call is interoffice, it will be directed either to a nearby central office or to a distant central office via a long-distance network. In the case of interoffice calls, a separate signaling network is employed to coordinate the call progression through a multitude of switches and telephone trunks. Assuming, however, that the call is an intraoffice call, if the called party's line is busy, the telephone switch will return a busy signal until the calling party returns to the “on-hook” condition. If the called party's line is not busy, it will be alerted, or “rung.” At the same time that the line is rung, an audible signal will be returned to the calling party to indicate that ringing is taking place. If the called party answers by going off-hook, ringing will be discontinued and a voice path will be established through the switching system to both the calling and called parties. The voice path is maintained until either party goes back on-hook. At that moment the voice path is disconnected, and call charging is recorded.
From the example described above, it is evident that telephone systems consist of four major components:
● Switching, between telephone sets and between trunks, as required.
● Signaling, between the telephone sets and the central offices as well as between central offices when needed.
● Transmission, between the central switching office and subscribers' telephone sets and also between central offices.
Each of these major components of a telephone system is discussed in turn in this section.
Switching
switching systems
Manual switching
 From the earliest days of the telephone, it was observed that it was more practical to connect different telephone instruments by running wires from each instrument to a central switching point, or telephone exchange, than it was to run wires between all the instruments. In 1878 the first telephone exchange was installed in New Haven, Conn., permitting up to 21 customers to reach one another by means of a manually operated central switchboard. The manual switchboard was quickly extended from 21 lines to hundreds of lines. Each line was terminated on the switchboard in a socket (called a jack), and a number of short, flexible circuits (called cords) with a plug on both ends of each cord were also provided. Two lines could thus be interconnected by inserting the two ends of a cord in the appropriate jacks.
From the earliest days of the telephone, it was observed that it was more practical to connect different telephone instruments by running wires from each instrument to a central switching point, or telephone exchange, than it was to run wires between all the instruments. In 1878 the first telephone exchange was installed in New Haven, Conn., permitting up to 21 customers to reach one another by means of a manually operated central switchboard. The manual switchboard was quickly extended from 21 lines to hundreds of lines. Each line was terminated on the switchboard in a socket (called a jack), and a number of short, flexible circuits (called cords) with a plug on both ends of each cord were also provided. Two lines could thus be interconnected by inserting the two ends of a cord in the appropriate jacks.Electromechanical switching
 The idea of automatic switching appeared as early as 1879, and the first fully automatic switch to achieve commercial success was invented in 1889 by Almon B. Strowger, the owner of an undertaking business in Kansas City, Mo. The Strowger switch consisted of essentially two parts: an array of 100 terminals, called the bank, that were arranged 10 rows high and 10 columns wide in a cylindrical arc; and a movable switch, called the brush, which was moved up and down the cylinder by one ratchet mechanism and rotated around the arc by another, so that it could be brought to the position of any of the 100 terminals. The ratcheting action on the brush gave Strowger's invention the common name step-by-step switch. The stepping movement was controlled directly by pulses from the telephone instrument. In the original systems, the caller generated the pulses by rapidly pushing a button switch on the instrument. Later, in 1896, Strowger's associates devised a rotary dial for generating the necessary pulses. (The rotary dialing system is described below in Rotary dialing (telephone).)
The idea of automatic switching appeared as early as 1879, and the first fully automatic switch to achieve commercial success was invented in 1889 by Almon B. Strowger, the owner of an undertaking business in Kansas City, Mo. The Strowger switch consisted of essentially two parts: an array of 100 terminals, called the bank, that were arranged 10 rows high and 10 columns wide in a cylindrical arc; and a movable switch, called the brush, which was moved up and down the cylinder by one ratchet mechanism and rotated around the arc by another, so that it could be brought to the position of any of the 100 terminals. The ratcheting action on the brush gave Strowger's invention the common name step-by-step switch. The stepping movement was controlled directly by pulses from the telephone instrument. In the original systems, the caller generated the pulses by rapidly pushing a button switch on the instrument. Later, in 1896, Strowger's associates devised a rotary dial for generating the necessary pulses. (The rotary dialing system is described below in Rotary dialing (telephone).)In 1913 J.N. Reynolds, an engineer with Western Electric (Western Electric Company Inc.) (at that time the manufacturing division of AT&T (AT&T Corporation)), patented a new type of telephone switch that became known as the crossbar switch. The crossbar switch was a grid composed of five horizontal selecting bars and 20 vertical hold bars. Input lines were connected to the hold bars and output lines to the selecting bars.
The five selecting bars could be rotated either upward or downward to make connections with the hold bars, thus effectively providing the switch with 10 horizontal rows. With the appropriate movement of the hold and selecting bars, any column could be connected to any row, and up to 10 simultaneous connections could be provided by the switch. The first crossbar system was demonstrated by Televerket, the Swedish government-owned telephone company, in 1919. The first commercially successful system, however, was the AT&T No. 1 crossbar system, first installed in Brooklyn, N.Y., in 1938. A series of improved versions followed the No. 1 crossbar system, the most notable being the No. 5 system. First deployed in 1948, the No. 5 crossbar system became the workhorse of the Bell System and by 1978 accounted for the largest number of installed lines throughout the world. Originally designed to serve 27,000 lines, it was later upgraded to handle 35,000 voice circuits. Further revisions of the AT&T crossbar systems continued until 1974, by which time new switching systems had shifted from electromechanical to electronic technology.
Electronic switching
 As telephone traffic continued to grow through the years, it was realized that large numbers of common control circuits would be required to switch this traffic and that switches of larger capacity would have to be created to handle it. Plans to provide new services via the telephone network also created a demand for innovative switch designs. With the advent of the transistor in 1947 and with subsequent advances in memory devices as well as other electronic devices and switches, it became possible to design a telephone switch that was based fundamentally on electronic components rather than on electromechanical switches.
As telephone traffic continued to grow through the years, it was realized that large numbers of common control circuits would be required to switch this traffic and that switches of larger capacity would have to be created to handle it. Plans to provide new services via the telephone network also created a demand for innovative switch designs. With the advent of the transistor in 1947 and with subsequent advances in memory devices as well as other electronic devices and switches, it became possible to design a telephone switch that was based fundamentally on electronic components rather than on electromechanical switches.Between 1960 and 1962 AT&T conducted field trials of a new electronic switching system (ESS) that would employ a variety of devices and concepts. The first commercial version, placed in service in 1965, became known as the No. 1 ESS. The No. 1 ESS employed a special type of reed switch known as a ferreed. Normally, a reed switch is constructed of two thin metal strips, or reeds, which are sealed in a glass tube. When an electromagnetic coil surrounding the tube is energized, the reeds close, making an electrical contact. In a ferreed a magnetic alloy known as Remendur is added to two sides of the reed relay. When the coil is energized, the Remendur material retains the magnetism and polarity, thus acting as a switch with a memory. In addition to this new switch device, the No. 1 ESS incorporated a new read-only memory device and a new random-access memory device. These innovations allowed the No. 1 system to serve as many as 65,000 two-way voice circuits, and it permitted hundreds of new features to be handled by the switching equipment. It underwent a number of revisions, including the adoption of semiconductor memory in 1977.
Digital switching
All the automatic telephone switches, both electromechanical and electronic, discussed up to this point are classified as space-division switches. Space-division switches are characterized by the fact that the speech path through a telephone switch is continuous throughout the exchange. That speech path is a metallic circuit, in the sense that it is provided entirely through the metallic contacts of the switch. Other forms of switching, however, are made possible by converting the fluctuating electric signal transmitted by the telephone instrument into digital format. In one of the first digital systems, known as time-division switching, the digitized speech information is sliced into a sequence of time intervals, or slots. Additional voice circuit slots, corresponding to other users, are inserted into this bit stream of data, in effect achieving a “time multiplexing” of several voice circuits. Switching essentially consists of interchanging the time position of one user's slot with that of another user in a determined manner. Time-division switches may also employ space-division switching; an appropriate mixture of time-division and space-division switching is advantageous in various circumstances.
The first time-division switching system to be deployed in the United States was the AT&T-designed No. 4 ESS, placed into service in 1976. The No. 4 ESS was a toll system capable of serving a maximum of 53,760 two-way trunk circuits. It was soon followed by several other time-division systems for switching local calls. Among these was the AT&T No. 5 ESS, improved versions of which could handle 100,000 lines.
The switching network
 As the telephone network evolved, it became necessary to organize it into a hierarchical system that would permit any customer to call any other customer. In order to support such an organization, switching centres in the American telephone system were organized into three classes: local, tandem, and toll. A local office (or end office) was a switching centre that connected directly to the customers' telephone instruments. A tandem office was one that served a cluster of local offices. Atoll office was involved in switching traffic over long-distance (or toll) circuits.
As the telephone network evolved, it became necessary to organize it into a hierarchical system that would permit any customer to call any other customer. In order to support such an organization, switching centres in the American telephone system were organized into three classes: local, tandem, and toll. A local office (or end office) was a switching centre that connected directly to the customers' telephone instruments. A tandem office was one that served a cluster of local offices. Atoll office was involved in switching traffic over long-distance (or toll) circuits.During the 1990s the telephone network significantly changed, because of a combination of several trends: an increased amount of traffic due to new telephone subscribers and to use of the telephone network to access the Internet; the advent of new “packet-switching” techniques (described below); new protocols for voice traffic over data networks; and the availability of a tremendous amount of bandwidth in the long-distance network. As a result of these developments, the hierarchical telephone network of the 1950s and '60s collapsed to mostly two levels of switching. End offices are now known as class 5 offices and are owned by the local service operators, or “local exchange carriers.” The old toll and tandem offices are now known as class 4 offices; they are owned by long-distance service providers, or “interexchange carriers.” Even this distinction between local and long-distance providers, however, became less clear with continued deregulation of the telephone industry.
While much telephone voice traffic continues to flow through the class 5 and class 4 switches, several alternatives have arisen for switching voice traffic through the telephone network. For instance, by digitizing, compressing, and packetizing voice signals, telephone traffic can be sent over conventional packet-switched data networks instead of dedicated circuits. Several approaches to packet switching are possible, based on whether variable-length or fixed-length packets are used. When variable-length packets are used and Internet protocol (IP) is the underlying protocol for the data network, the mechanism is called “voice over IP” (VoIP). In such a configuration, voice traffic is switched over the Internet using a router, a device consisting of input and output ports from the network, a switching fabric to switch between input and output, and a processor to execute the routing protocols and perform network management. When the digitized voice signal is packed into fixed-length packets and sent over an asynchronous transfer mode (ATM) network, the method is known as “voice over ATM” (VoATM). Within the network, ATM switches direct packets from source to destination.
Signaling
A major component of any telephone system is signaling, in which electric pulses or audible tones are used for alerting (requesting service), addressing (e.g., dialing the called party's number at the subscriber set), supervision (monitoring idle lines), and information (providing dial tones, busy signals, and recordings).
In general, signaling may occur either within the subscriber loop—that is, within the circuit between the individual telephone instrument and the local office—or in circuits between offices.
Call-number dialing
Rotary dialing
The first automatic switching systems, based on the Strowger switch described in the section Electromechanical switching (telephone), were activated by a push button on the calling party's telephone. More accurate call dialing was permitted by the advent of the rotary dial in 1896. A number of different dial designs were placed in service until 1910, when designs were standardized, and after 1910 the design and operation of the rotary dial did not change in its essentials.
 In a rotary dial, a number of pulses, or interruptions in current flow, are transmitted to the switching office in proportion to the rotation of the dial. When the dial is rotated, a spring is wound, and when the dial is subsequently released, the spring causes the dial to rotate back to its original position. Inside the dial a governor device ensures a constant rate of return rotation, and a shaft on the governor turns a cam that opens and closes a switch contact. An open switch contact stops current from flowing into the telephone set, thereby creating a dial pulse. Each dial pulse corresponds to one additional digit—i.e., two pulses correspond to the digit 2, three pulses correspond to the digit 3.
In a rotary dial, a number of pulses, or interruptions in current flow, are transmitted to the switching office in proportion to the rotation of the dial. When the dial is rotated, a spring is wound, and when the dial is subsequently released, the spring causes the dial to rotate back to its original position. Inside the dial a governor device ensures a constant rate of return rotation, and a shaft on the governor turns a cam that opens and closes a switch contact. An open switch contact stops current from flowing into the telephone set, thereby creating a dial pulse. Each dial pulse corresponds to one additional digit—i.e., two pulses correspond to the digit 2, three pulses correspond to the digit 3.The rotary dial was designed for operating an electromechanical switching system, so that the speed of operation of the dial was limited by the operating speed of the switches. Within the Bell System the dial pulse period is nominally one-tenth of a second long, permitting a rate of 10 pulses per second. Modern telephones are now wired for push-button dialing, but even they can usually generate pulse signals when the push-button pad is operated in conjunction with electronic timing circuits.
Push-button dialing
In the 1950s, after conducting extensive studies, AT&T concluded that push-button dialing was about twice as efficient as rotary dialing. Trials had already been conducted of special telephone instruments that incorporated mechanically vibrating reeds, but in 1963 an electronic push-button system, known as Touch-Tone dialing, was offered to AT&T customers. Touch-Tone soon became the standard U.S. dialing system, and eventually it became the standard worldwide.The Touch-Tone system is based on a concept known as dual-tone multifrequency (DTMF). The 10 dialing digits (0 through 9) are assigned to specific push buttons, and the buttons are arranged in a grid with four rows and three columns. The pad also has two more buttons, bearing the star (*) and pound (\\#) symbols, to accommodate various data services and customer-controlled calling features. Each of the rows and columns is assigned a tone of a specific frequency, the columns having higher-frequency tones and the rows having tones of lower frequency. When a button is pushed, a dual-tone signal is generated that corresponds to the frequencies assigned to the column and row that intersect at that point. This signal is translated into a digit at the local office.Interoffice signaling
Interoffice signaling also has undergone a notable evolution, changing over from simple “in-band” methods to fully digitized “out-of-band” methods.
In-band signaling
In the earliest days of the telephone network, signaling was provided by means of direct current (DC) between the telephone instrument and the operator. As long-distance circuits and automatic switching systems were placed into service, the use of DC became obsolete, since long-distance circuits could not pass the DC signals. Hence, alternating current (AC) began to be used over interoffice circuits. Until the mid-1970s, interoffice circuits employed what has become known as in-band signaling, in which the same circuits that were used to connect two telephone instruments and serve as the voice path were also used to transmit the AC signals that set up the switches employed in the circuit. Single-frequency tones were used in the switching network to signal availability of a trunk. Once a trunk line became available, multiple-frequency tones were used to pass the address information between switches. Multiple-frequency signaling employed pairs of six tones, similar to the signaling used in Touch-Tone dialing.
Out-of-band signaling
Despite the simplicity of the in-band method, this type of signaling presented a number of problems. First, because the in-band signals by necessity fell within the bandwidth of speech signals, speech signals could at times interfere with the in-band signals. Second, in-band signaling did not always make efficient use of the available telephone circuits. For example, if a called party's telephone instrument was in use, the called party's central office would generate a busy signal that was carried by the already established voice path through the public switched telephone network to the calling party's handset. Hence, a full voice-circuit path through the network would be tied up merely to convey a busy signal.
In order to overcome these issues and to speed the call set-up process in long-distance calls, another form of interoffice signaling, known as common channel signaling (CCS), was developed. In CCS an “out-of-band” circuit (that is, a separate circuit from that used to establish the voice connection) is dedicated to serve as a data link, carrying address information and certain other information signals between the microprocessors (microprocessor) employed in telephone switches. The first version of CCS was developed between 1964 and 1968 by the International Telegraph and Telephone Consultative Committee (CCITT), a predecessor of the Telecommunication Standardization Sector of the International Telecommunication Union. The first system was standardized internationally as CCITT-6 signaling; within North America, CCITT-6 was modified by AT&T and became known as common channel interoffice signaling, CCIS. CCIS was first installed in the Bell System in 1976.
Although CCITT-6 was standardized by an international body, it was never universally deployed. Recognizing this shortcoming as well as the still-growing amount of international traffic within the worldwide telephone network, the CCITT between 1980 and 1991 developed a successor version known as CCITT-7. Within North America, CCITT-7 was implemented as Signaling System 7, or SS7.
Transmission
Development of long-distance transmission
From single-wire to two-wire circuits
The first telephone lines employed the same type of outdoor circuits as telegraph lines—namely, a single noninsulated iron or steel wire supported by wooden poles with glass insulators. Since electric signals require two wires, the second “wire” was a ground return through the earth. Unfortunately, the use of a single wire made the telephone circuit extremely susceptible to interference by other signals. This problem was addressed by the use of a two-wire, or “metallic,” circuit; the first demonstration of such a system occurred in 1881 on a telephone line between Providence, R.I., and Boston.
As the distances between telephone instruments began to increase beyond those served by local exchange offices, a number of technical problems arose that had not been experienced in earlier telegraph systems. Even with the two-wire system, it soon became apparent that telephone signals could be transmitted only a fraction of the distance of telegraph signals, because of the greater attenuation in iron and steel of the higher frequencies of telephone signals. The principal difference between telegraph systems and the telephone system was that the frequencies of the signals carried by telephone lines were as much as 30 times greater than those of telegraph signals. Several individuals noted that copper wire greatly improved the situation, but manufacturing techniques produced brittle wire that was not self-supporting over the spans between poles. The problem was solved in 1877 with the invention of hard-drawn copper wire. In 1884 the first test of hard-drawn copper wire for long-distance telephone service was conducted between New York City and Boston.
Problems of interference and attenuation
Two-wire copper circuits did not solve all the problems of long-distance telephony, however. As the number of lines grew, interference (or cross talk) from adjacent lines on the same crossarm of the telephone pole became significant. It was found that transposing the wires by twisting them at specified intervals canceled the cross talk. Another major problem was caused by distance: over the lengths of long-distance lines, even the two-wire copper circuit attenuated the telephone signal significantly. In a series of theoretical papers published in book form in 1892, Oliver Heaviside (Heaviside, Oliver), an English physicist, developed the theory behind the transmission of signals over two-wire circuits. In the United States, Michael I. Pupin (Pupin, Michael Idvorsky) of Columbia University in New York City and George A. Campbell of AT&T (AT&T Corporation) both read Heaviside's papers and realized that introducing inductive coils (loading coils) at regular intervals along the length of the telephone line could significantly reduce the attenuation of signals within the voice band (i.e., at frequencies less than 3.5 kilohertz). Both Campbell and Pupin applied for a patent on the concept of loading coils; after extended patent interference proceedings, the patent was finally awarded to Pupin in 1904. The first long-distance application of loading coils occurred in 1900, over a 40-km (24-mile) circuit in Boston. It was followed later that year by a test over a 1,000-km (600-mile) circuit. By 1925 approximately 1.25 million loading coils were in use over 3 million km (1.8 million miles) of wire circuits.
Even with the use of loading coils, telephone communication across countries as large as the United States was not possible without some form of amplification. A mechanical amplifier, which made use of an electromagnet receiver and a carbon transmitter, was installed in a commercial circuit between New York City and Chicago in 1904, but it was not until the patenting of the vacuum tube by Lee De Forest (De Forest, Lee) in 1907 that truly transcontinental telephone communication was possible. In 1915 the first transcontinental line, between New York City and San Francisco, was placed in service. Although this system was commercially viable, its cost and limited capacity (only one two-way circuit) prevented substantial growth of transcontinental telephony until carrier multiplexing techniques were introduced beginning in 1918. With carrier multiplexing, four or more two-way voice channels could be transmitted simultaneously over two-wire or four-wire circuits. By 1927 more than 5 million km (3 million miles) of long-distance circuits covered the entire United States—more than 10 times the circuitry present in 1900.
From analog to digital transmission

 Until the early 1980s the bulk of long-distance transmission was provided by analog systems in which individual telephone conversations were stacked in four-kilohertz intervals across the transmission band—a process known as frequency-division multiplexing (FDM). However, particularly with the development of fibre optics (see below), these analog systems were rapidly replaced by digital systems. In digital transmission, which may also be carried over the coaxial and microwave systems, the telephone signals are first converted from an analog format to a quantized, discrete time format. The signals are then multiplexed together using time-division multiplexing (TDM), a method in which each digitized telephone signal is assigned a specific slot within a fixed time frame. In order to provide standard interfaces between transmission and switching equipment, multiplexed signals are further combined or aggregated in hierarchical arrangements.
Until the early 1980s the bulk of long-distance transmission was provided by analog systems in which individual telephone conversations were stacked in four-kilohertz intervals across the transmission band—a process known as frequency-division multiplexing (FDM). However, particularly with the development of fibre optics (see below), these analog systems were rapidly replaced by digital systems. In digital transmission, which may also be carried over the coaxial and microwave systems, the telephone signals are first converted from an analog format to a quantized, discrete time format. The signals are then multiplexed together using time-division multiplexing (TDM), a method in which each digitized telephone signal is assigned a specific slot within a fixed time frame. In order to provide standard interfaces between transmission and switching equipment, multiplexed signals are further combined or aggregated in hierarchical arrangements.Coaxial cable
 Long-distance coaxial cable systems were introduced in the United States in 1946. Employing analog FDM methods, the first coaxial system could support 1,800 two-way voice circuits by bundling together three working pairs of cable, each pair transmitting 600 voice signals simultaneously. In the last analog coaxial system, deployed in 1978, each pair of cables transmitted 13,200 voice signals, and the cable bundle contained 10 working pairs; this combination supported 132,000 two-way voice circuits. Digital coaxial systems were introduced into the U.S. long-distance network beginning in 1962. TDM, a digital cable system first deployed in 1975, can support up to 40,320 two-way voice circuits over 10 working pairs of coaxial cable.
Long-distance coaxial cable systems were introduced in the United States in 1946. Employing analog FDM methods, the first coaxial system could support 1,800 two-way voice circuits by bundling together three working pairs of cable, each pair transmitting 600 voice signals simultaneously. In the last analog coaxial system, deployed in 1978, each pair of cables transmitted 13,200 voice signals, and the cable bundle contained 10 working pairs; this combination supported 132,000 two-way voice circuits. Digital coaxial systems were introduced into the U.S. long-distance network beginning in 1962. TDM, a digital cable system first deployed in 1975, can support up to 40,320 two-way voice circuits over 10 working pairs of coaxial cable.Microwave link
Long-distance transmission also has been provided by radio link in the form of point-to-point microwave systems. First employed in 1950, microwave transmission has the advantage of not requiring access to all contiguous land along the path of the system. Because microwave systems are line-of-sight media, radio towers must be spaced approximately every 42 km (25 miles) along the route. Point-to-point microwave systems generally operate in the frequency ranges of 3.7–4.2 gigahertz or 5.925–6.425 gigahertz; some systems operate at 11 or 18 gigahertz. Following the trend of coaxial cable systems, the first microwave links were analog systems. Early systems had a capacity of 2,400 two-way voice circuits, and later systems could support 61,800 two-way circuits. Beginning in 1981, digital microwave systems began to be deployed in the U.S. system that could support the wide range of digital services available over the PSTN.
Optical-fibre cable
 Standardized digital transmission rates for the synchronous digital hierarchy (SDH), the synchronous optical network (SONET), and the optical carrier (OC) hierarchyBecause of their great bandwidth, reliability, and low cost, optical fibres became the preferred medium in both short-haul and long-haul transmission systems following their first deployment in 1979. Since 1990 there has been significant progress in the development of fibre optics, permitting transmission at ever higher data rates. Several different technologies have been essential in this development: so-called nonzero-dispersion optical fibres, which permit the transmission of multiple wavelengths of light at high data rates; erbium-doped fibre amplifiers, which use a laser pump source to amplify optical signals over long distances; and “tunable” lasers, which generate light at several frequencies, thereby permitting transmission of multiple wavelengths over a single optical fibre. Multiple wavelength transmission, known as wave division multiplexing (WDM), allows higher data rates to be achieved over a single fibre; when 40 or more different wavelengths are multiplexed, the technique is known as dense wave division multiplexing (DWDM). DWDM technology has permitted data transmission at rates of 400 gigabits per second, each wavelength supporting approximately 10 gigabits per second. These data rates are equivalent to some 6,000,000 voice circuits per fibre and 150,000 voice circuits per wavelength. Long-distance carriers in the developed world make use of optical fibre technology at a variety of data rates. Most systems employ the standardized hierarchy of digital transmission rates known as the synchronous optical network (SONET) or optical carrier (OC) in the United States and as the synchronous digital hierarchy (SDH) elsewhere, as shown in the table (Standardized digital transmission rates for the synchronous digital hierarchy (SDH), the synchronous optical network (SONET), and the optical carrier (OC) hierarchy).
Standardized digital transmission rates for the synchronous digital hierarchy (SDH), the synchronous optical network (SONET), and the optical carrier (OC) hierarchyBecause of their great bandwidth, reliability, and low cost, optical fibres became the preferred medium in both short-haul and long-haul transmission systems following their first deployment in 1979. Since 1990 there has been significant progress in the development of fibre optics, permitting transmission at ever higher data rates. Several different technologies have been essential in this development: so-called nonzero-dispersion optical fibres, which permit the transmission of multiple wavelengths of light at high data rates; erbium-doped fibre amplifiers, which use a laser pump source to amplify optical signals over long distances; and “tunable” lasers, which generate light at several frequencies, thereby permitting transmission of multiple wavelengths over a single optical fibre. Multiple wavelength transmission, known as wave division multiplexing (WDM), allows higher data rates to be achieved over a single fibre; when 40 or more different wavelengths are multiplexed, the technique is known as dense wave division multiplexing (DWDM). DWDM technology has permitted data transmission at rates of 400 gigabits per second, each wavelength supporting approximately 10 gigabits per second. These data rates are equivalent to some 6,000,000 voice circuits per fibre and 150,000 voice circuits per wavelength. Long-distance carriers in the developed world make use of optical fibre technology at a variety of data rates. Most systems employ the standardized hierarchy of digital transmission rates known as the synchronous optical network (SONET) or optical carrier (OC) in the United States and as the synchronous digital hierarchy (SDH) elsewhere, as shown in the table (Standardized digital transmission rates for the synchronous digital hierarchy (SDH), the synchronous optical network (SONET), and the optical carrier (OC) hierarchy).Overseas transmission
Terrestrial radio
The extension of telephone service to other countries and continents was a goal set in the earliest days of telephone systems. In North America, service to Canada and Mexico was a natural extension of the long-distance methods used within the United States, but transmission across the ocean to Europe called for a significant amount of ingenuity. While transatlantic telegraph cables had been in service since 1866, these same cables could not be used for voice transmission, because of bandwidth limitations. Instead, the first transatlantic telephone service made use of radio. Regular service via radio between the United States and Europe was first established in 1927 using long-wave frequencies in the range of 58.5 to 61.5 kilohertz. Within the first year this system supported 11,000 calls. By 1929 additional circuits were added in the range of 6–25 megahertz.
undersea cable
It was soon realized that the number of transatlantic telephone calls would rapidly outgrow available radio spectrum. Accordingly, transoceanic cable technology was developed that made use of amplifiers or repeaters placed at regular intervals along the length of the cable. Early deployment of undersea cables had been accomplished previously in 1921, with a 184-km-long (114-mile-long) cable between Cuba and Key West, Fla. The first transatlantic cable was laid in 1956 between Canada and Scotland—specifically, between Clarenville, Nfld., Can., and Oban, Scot., a distance of 3,584 km (2,226 miles). This system made use of two coaxial cables, one for each direction, and used analog FDM to carry 36 two-way voice circuits. With the availability of the cable system, transatlantic telephone traffic increased dramatically, from 1.7 million calls in 1955 to 3.7 million in 1960. Six additional coaxial cables, representing four successive generations of cable design, were laid across the Atlantic Ocean between 1956 and 1983. Each generation of cable system supported a greater number of voice circuits—the last supporting 4,200. In order to improve the voice channel capacity of transoceanic cable systems, a method of voice data reduction known as time assignment speech interpolation, or TASI, was introduced. In TASI the natural pauses occurring in speech were used to carry other speech conversations. In this way a coaxial cable system designed for 4,200 two-way voice circuits could support 10,500 circuits.
Developments in fibre optics also had a significant effect on the deployment of undersea cable. From 1989 to 2001 a total of 15 new transatlantic optical fibre cables were deployed, along with a similar number of transpacific cables. Many other short-segment undersea cables were deployed to connect various countries within a continent. Since 1996 many of these optical cables have employed erbium-doped fibre amplifiers and wave division multiplexing, permitting the highest-quality data transmission at very high rates. One of the more ambitious programs, the TAT-14, deployed in 2001, connects the United States, France, Germany, Denmark, and the United Kingdom with a 15,428-km (9,581-mile) undersea cable. As deployed, the cable has four fibre pairs and has a protected capacity of 640 gigabits per second, corresponding to roughly 9.6 million voice circuits. Owing to such capacity, TASI is no longer needed to increase the number of voice circuits over undersea cable.
Satellite (satellite communication)
 About the same time that transatlantic cables were being installed, another transmission method, satellite communication, was being investigated. In 1962 AT&T in conjunction with the National Aeronautics and Space Administration (NASA) launched the communication satellite Telstar into an elliptical medium Earth orbit, its apogee, or farthest distance from Earth, being some 5,600 km (3,500 miles). Telstar 1 served as a repeater in the sky; that is, it simply translated all frequencies within its receiving bandwidth in the six-gigahertz band to frequencies in its four-gigahertz transmitting band. The 32-megahertz transmission bandwidth of Telstar 1 could support one one-way television signal or multiple two-way telephone conversations.
About the same time that transatlantic cables were being installed, another transmission method, satellite communication, was being investigated. In 1962 AT&T in conjunction with the National Aeronautics and Space Administration (NASA) launched the communication satellite Telstar into an elliptical medium Earth orbit, its apogee, or farthest distance from Earth, being some 5,600 km (3,500 miles). Telstar 1 served as a repeater in the sky; that is, it simply translated all frequencies within its receiving bandwidth in the six-gigahertz band to frequencies in its four-gigahertz transmitting band. The 32-megahertz transmission bandwidth of Telstar 1 could support one one-way television signal or multiple two-way telephone conversations.Because of its low orbit, Telstar was not always in view of the communications ground stations. This problem was solved in July 1963 with the launch of the first geostationary (geostationary orbit) communication satellite, Syncom 2, which followed a circular path some 35,900 km (22,300 miles) above the Earth. Syncom 2 was followed by a series of geostationary satellites, each providing a capacity greater than the previous generation. For instance, the Intelsat 11 satellite, launched Oct. 5, 2007, which orbits above the Equator at longitude 43° W (just east of Brazil), uses 12 active C-band transponders to relay digital data over most of North and South America and uses 18 Ku-band transponders primarily for relaying television broadcasts in Brazil.
Unfortunately, geostationary satellites, because of their great distance above the Earth, introduce a quarter-second signal delay, sometimes making two-way voice conversation difficult. For this reason, and also because of the availability of high-capacity undersea cables, geostationary satellites are no longer used for common-carrier telephone communication in much of the world. However, since optical-fibre connections are not available everywhere, geostationary satellites continue to be launched to support voice as well as data traffic.
- Denis Parsons Burkitt
- Denis, Saint
- Denis Sassou-Nguesso
- Denis Winston, Baron Healey of Riddlesden Healey
- Denis Winston Healey, Baron Healey of Riddlesden
- denitrifying bacteria
- Denizli
- Denkyera
- Denmark
- Denmark, flag of
- Denmark's Aquarium
- Denmark Strait
- Denmark Vesey
- Denner, Johann Christoph
- Dennett, Mary Coffin Ware
- Dennie, Joseph
- Dennis
- Dennis Brutus
- Dennis C. Blair
- Dennis, Eugene
- Dennis Gabor
- Dennis, John
- Dennis Kucinich
- Dennis, Nigel
- Dennison, Aaron Lufkin