mechanics
physics
Introduction
science concerned with the motion of bodies under the action of forces, including the special case in which a body remains at rest. Of first concern in the problem of motion are the forces that bodies exert on one another. This leads to the study of such topics as gravitation, electricity, and magnetism, according to the nature of the forces involved. Given the forces, one can seek the manner in which bodies move under the action of forces; this is the subject matter of mechanics proper.
Historically, mechanics was among the first of the exact sciences to be developed. Its internal beauty as a mathematical discipline and its early remarkable success in accounting in quantitative detail for the motions of the Moon, the Earth, and other planetary bodies had enormous influence on philosophical thought and provided impetus for the systematic development of science into the 20th century.
Mechanics may be divided into three branches: statics, which deals with forces acting on and in a body at rest; kinematics, which describes the possible motions of a body or system of bodies; and kinetics, which attempts to explain or predict the motion that will occur in a given situation. Alternatively, mechanics may be divided according to the kind of system studied. The simplest mechanical system is the particle, defined as a body so small that its shape and internal structure are of no consequence in the given problem. More complicated is the motion of a system of two or more particles that exert forces on one another and possibly undergo forces exerted by bodies outside of the system.
The principles of mechanics have been applied to three general realms of phenomena. The motions of such celestial bodies as stars, planets, and satellites can be predicted with great accuracy thousands of years before they occur. (The theory of relativity predicts some deviations from the motion according to classical, or Newtonian, mechanics; however, these are so small as to be observable only with very accurate techniques, except in problems involving all or a large portion of the detectable universe.) As the second realm, ordinary objects on Earth down to microscopic size (moving at speeds much lower than that of light) are properly described by classical mechanics without significant corrections. The engineer who designs bridges or aircraft may use the Newtonian laws of classical mechanics with confidence, even though the forces may be very complicated, and the calculations lack the beautiful simplicity of celestial mechanics. The third realm of phenomena comprises the behaviour of matter and electromagnetic radiation on the atomic and subatomic scale. Although there were some limited early successes in describing the behaviour of atoms in terms of classical mechanics, these phenomena are properly treated in quantum mechanics.
Ed.
Classical mechanics deals with the motion of bodies under the influence of forces (force) or with the equilibrium of bodies when all forces are balanced. The subject may be thought of as the elaboration and application of basic postulates first enunciated by Isaac Newton (Newton, Sir Isaac) in his Philosophiae Naturalis Principia Mathematica (1687), commonly known as the Principia. These postulates, called Newton's laws of motion, are set forth below. They may be used to predict with great precision a wide variety of phenomena ranging from the motion of individual particles to the interactions of highly complex systems. A variety of these applications are discussed in this article.
In the framework of modern physics, classical mechanics can be understood to be an approximation arising out of the more profound laws of quantum mechanics and the theory of relativity. However, that view of the subject's place greatly undervalues its importance in forming the context, language, and intuition of modern science and scientists. Our present-day view of the world and man's place in it is firmly rooted in classical mechanics. Moreover, many ideas and results of classical mechanics survive and play an important part in the new physics.
The central concepts in classical mechanics are force, mass, and motion. Neither force nor mass is very clearly defined by Newton, and both have been the subject of much philosophical speculation since Newton. Both of them are best known by their effects. Mass is a measure of the tendency of a body to resist changes in its state of motion. Forces, on the other hand, accelerate (acceleration) bodies, which is to say, they change the state of motion of bodies to which they are applied. The interplay of these effects is the principal theme of classical mechanics.
Although Newton's laws focus attention on force and mass, three other quantities take on special importance because their total amount never changes. These three quantities are energy, (linear) momentum, and angular momentum. Any one of these can be shifted from one body or system of bodies to another. In addition, energy may change form while associated with a single system, appearing as kinetic energy, the energy of motion; potential energy, the energy of position; heat, or internal energy, associated with the random motions of the atoms or molecules composing any real body; or any combination of the three. Nevertheless, the total energy (energy, conservation of), momentum, and angular momentum in the universe never changes. This fact is expressed in physics by saying that energy, momentum (momentum, conservation of), and angular momentum are conserved. These three conservation laws (conservation law) arise out of Newton's laws, but Newton himself did not express them. They had to be discovered later.
It is a remarkable fact that, although Newton's laws are no longer considered to be fundamental, nor even exactly correct, the three conservation laws derived from Newton's laws—the conservation of energy, momentum, and angular momentum—remain exactly true even in quantum mechanics and relativity. In fact, in modern physics, force is no longer a central concept, and mass is only one of a number of attributes of matter. Energy, momentum, and angular momentum, however, still firmly hold centre stage. The continuing importance of these ideas inherited from classical mechanics may help to explain why this subject retains such great importance in science today.
The origins and foundations of mechanics
History
The discovery of classical mechanics was made necessary by the publication, in 1543, of the book De revolutionibus orbium coelestium libri VI (“Six Books Concerning the Revolutions of the Heavenly Orbs”) by the Polish astronomer Nicolaus Copernicus (Copernicus, Nicolaus). The book was about revolutions, real ones in the heavens (celestial mechanics), and it sparked the metaphorically named scientific revolution that culminated in Newton's Principia about 150 years later. The scientific revolution would change forever how people think about the universe (cosmology).
In his book, Copernicus pointed out that the calculations needed to predict the positions of the planets in the night sky would be somewhat simplified if the Sun (Copernican system), rather than the Earth, were taken to be the centre of the universe (by which he meant what is now called the solar system). Among the many problems posed by Copernicus's book was an important and legitimate scientific question: if the Earth is hurtling through space and spinning on its axis as Copernicus's model prescribed, why is the motion not apparent?
To the casual observer, the Earth certainly seems to be solidly at rest. Scholarly thought about the universe in the centuries before Copernicus was largely dominated by the philosophy of Plato and Aristotle. According to Aristotelian (Aristotelianism) science, the Earth (geocentric system) was the centre of the universe. The four elements—earth, water, air, and fire—were naturally disposed in concentric spheres, with earth at the centre, surrounded respectively by water, air, and fire. Outside these were the crystal spheres on which the heavenly bodies rotated. Heavy, earthy objects fell because they sought their natural place. Smoke would rise through air, and bubbles through water for the same reason. These were natural motions. All other kinds of motion were violent motion and required a proximate cause. For example, an oxcart would not move without the help of an ox.
When Copernicus displaced the Earth from the centre of the universe, he tore the heart out of Aristotelian mechanics, but he did not suggest how it might be replaced. Thus, for those who wished to promote Copernicus's ideas, the question of why the motion of the Earth is not noticed took on a special urgency. Without suitable explanation, Copernicanism was a violation not only of Aristotelian philosophy but also of plain common sense.
The solution to the problem was discovered by the Italian mathematician and scientist Galileo Galilei. Inventing experimental physics as he went along, Galileo studied the motion of balls rolling on inclined planes (inclined plane). He noticed that, if a ball rolled down one plane and up another, it would seek to regain its initial height above the ground, regardless of the inclines of the two planes. That meant, he reasoned, that, if the second plane were not inclined at all but were horizontal instead, the ball, unable to regain its original height, would keep rolling forever. From this observation he deduced that bodies do not need a proximate cause to stay in motion. Instead, a body moving in the horizontal direction would tend to stay in motion unless something interfered with it. This is the reason that the Earth's motion is not apparent; the surface of the Earth and everything on and around it are always in motion together and therefore only seem to be at rest.
This observation, which was improved upon by the French philosopher and scientist René Descartes (Descartes, René), who altered the concept to apply to motion in a straight line, would ultimately become Newton's first law, or the law of inertia. However, Galileo's experiments took him far beyond even this fundamental discovery. Timing the rate of descent of the balls (by means of precision water clocks and other ingenious contrivances) and imagining what would happen if experiments could be carried out in the absence of air resistance, he deduced that freely falling (free-fall) bodies would be uniformly accelerated at a rate independent of their mass. Moreover, he understood that the motion of any projectile was the consequence of simultaneous and independent inertial motion in the horizontal direction and falling motion in the vertical direction. In his book Dialogues Concerning the Two New Sciences (1638), Galileo wrote,
It has been observed that missiles and projectiles describe a curved path of some sort; however, no one has pointed out the fact that this path is a parabola. But this and other facts, not few in number or less worth knowing, I have succeeded in proving. …
Just as Galileo boasted, his studies would encompass many aspects of what is now known as classical mechanics, including not only discussions of the law of falling bodies and projectile motion but also an analysis of the pendulum, an example of harmonic motion. His studies fall into the branch of classical mechanics known as kinematics, or the description of motion. Although Galileo and others tried to formulate explanations of the causes of motion, the focus of the field termed dynamics, none would succeed before Newton.
Galileo's fame during his own lifetime rested not so much on his discoveries in mechanics as on his observations of the heavens, which he made with the newly invented telescope about 1610. What he saw there, particularly the moons of Jupiter, either prompted or confirmed his embrace of the Copernican system. At the time, Copernicus had few other followers in Europe. Among those few, however, was the brilliant German astronomer and mathematician Johannes Kepler (Kepler, Johannes).
Kepler devoted much of his scientific career to elucidating the Copernican system. Although Copernicus had put the Sun at the centre of the solar system, his astronomy was still rooted in the Platonic ideal of circular motion. Before Copernicus, astronomers had tried to account for the observed motions of heavenly bodies by imagining that they rotated on crystal spheres centred on the Earth. This picture worked well enough for the stars but not for the planets. To “save the appearances” (fit the observations) an elaborate system emerged of circular orbits, called epicycles, on top of circular orbits. This system (Ptolemaic system) of astronomy culminated with the Almagest of Ptolemy, who worked in Alexandria in the 2nd century AD. The Copernican innovation simplified the system somewhat, but Copernicus's astronomical tables were still based on circular orbits and epicycles. Kepler set out to find further simplifications that would help to establish the validity of the Copernican system.
In the course of his investigations, Kepler discovered the three laws of planetary motion (Kepler's laws of planetary motion) that are still named for him. Kepler's first law says that the orbits of the planets are ellipses, with the Sun at one focus. This observation swept epicycles out of astronomy. His second law stated that, as the planet moved through its orbit, a line joining it to the Sun would sweep out equal areas in equal times. For Kepler, this law was merely a rule that helped him make precise calculations for his astronomical tables. Later, however, it would be understood to be a direct consequence of the law of conservation of angular momentum. Kepler's third law stated that the period of a planet's orbit depended only on its distance from the Sun. In particular, the square of the period is proportional to the cube of the semimajor axis of its elliptical orbit. This observation would suggest to Newton the inverse-square law of universal gravitational attraction.
By the middle of the 17th century, the work of Galileo, Kepler, Descartes, and others had set the stage for Newton's (Newton, Sir Isaac) grand synthesis. Newton is thought to have made many of his great discoveries at the age of 23, when in 1665–66 he retreated from the University of Cambridge to his Lincolnshire home to escape from the bubonic plague. However, he chose not to publish his results until the Principia emerged 20 years later. In the Principia, Newton set out his basic postulates concerning force, mass, and motion. In addition to these, he introduced the universal force of gravity (gravitation), which, acting instantaneously through space, attracted every bit of matter in the universe to every other bit of matter, with a strength proportional to their masses and inversely proportional to the square of the distance between them. These principles, taken together, accounted not only for Kepler's three laws and Galileo's falling bodies and projectile motions but also for other phenomena, including the precession of the equinoxes, the oscillations of the pendulum, the speed of sound in air, and much more. The effect of Newton's Principia was to replace the by-then discredited Aristotelian worldview with a new, coherent view of the universe and how it worked. The way it worked is what is now referred to as classical mechanics.
Fundamental concepts
Units and dimensions
Quantities have both dimensions, which are an expression of their fundamental nature, and units, which are chosen by convention to express magnitude or size. For example, a series of events have a certain duration in time. Time is the dimension of the duration. The duration might be expressed as 30 minutes or as half an hour. Minutes and hours are among the units in which time may be expressed. One can compare quantities of the same dimensions, even if they are expressed in different units (an hour is longer than a minute). Quantities of different dimensions cannot be compared with one another.
The fundamental dimensions used in mechanics are time, mass, and length. Symbolically, these are written as t, m, and l, respectively. The study of electromagnetism adds an additional fundamental dimension, electric charge, or q. Other quantities have dimensions (dimensional analysis) compounded of these. For example, speed has the dimensions distance divided by time, which can be written as l/t, and volume has the dimensions distance cubed, or l3. Some quantities, such as temperature, have units but are not compounded of fundamental dimensions.
There are also important dimensionless numbers in nature, such as the number π (pi) = 3.14159 . . . . Dimensionless numbers may be constructed as ratios of quantities having the same dimension. Thus, the number π is the ratio of the circumference of a circle (a length) to its diameter (another length). Dimensionless numbers have the advantage that they are always the same, regardless of what set of units is being used.
Governments have traditionally been responsible for establishing and enforcing standard units for the sake of orderly commerce, navigation, science, and, of course, taxation. Today all such units are established by international treaty, revised every few years in light of scientific findings. The units used for most scientific measurements (measurement) are those designated the International System of Units (Système International d'Unités), or SI for short. They are based on the metric system, first adopted officially by France in 1795. Other units, such as those of the British engineering system (British Imperial System), are still in use in some places, but these are now defined in terms of the SI units.
The fundamental unit of length is the metre. A metre used to be defined as the distance between two scratch marks on a metal bar kept in Paris, but it is now much more precisely defined as the distance that light travels in a certain time interval (1/299,792,458 of a second). By contrast, in the British system, units of length have a clear human bias: the foot, the inch (the first joint of the thumb), the yard (distance from nose to outstretched fingertip), and the mile (one thousand standard paces of a Roman legion). Each of these is today defined as some fraction or multiple of a metre (one yard is nearly equal to one metre). In the SI or the metric system, lengths are expressed as decimal fractions or multiples of a metre (a millimetre = one-thousandth of a metre; a centimetre = one-hundredth of a metre; a kilometre = one thousand metres).
Times longer than one second are expressed in the units seconds, minutes, hours, days, weeks, and years. Times shorter than one second are expressed as decimal fractions (a millisecond = one-thousandth of a second, a microsecond = one-millionth of a second, and so on). The fundamental unit of time (i.e., the definition of one second) is today based on the intrinsic properties of certain kinds of atoms (an excitation frequency of the isotope cesium-133).
Units of mass are also defined in a way that is technically sound, but in common usage they are the subject of some confusion because they are easily confused with units of weight, which is a different physical quantity. The weight of an object is the consequence of the Earth's gravity operating on its mass. Thus, the mass of a given object is the same everywhere, but its weight varies slightly if it is moved about the surface of the Earth, and it would change a great deal if it were moved to the surface of another planet. Also, weight and mass do not have the same dimensions (weight has the dimensions ml/t2). The Constitution of the United States, which calls on the government to establish uniform “weights and measures,” is oblivious to this distinction, as are merchants the world over, who measure the weight of bread or produce but sell it in units of kilograms, the SI unit of mass. (The kilogram is equal to 1,000 grams; 1 gram is the mass of 1 cubic centimetre of water—under appropriate conditions of temperature and pressure.)
Vectors (vector)
The equations of mechanics are typically written in terms of Cartesian coordinates. At a certain time t, the position of a particle may be specified by giving its coordinates x(t), y(t), and z(t) in a particular Cartesian frame of reference. However, a different observer of the same particle might choose a differently oriented set of mutually perpendicular axes, say, x′, y′, and z′. The motion of the particle is then described by the first observer in terms of the rate of change of x(t), y(t), and z(t), while the second observer would discuss the rates of change of x′(t), y′(t), and z′(t). That is, both observers see the same particle executing the same motion and obeying the same laws, but they describe the situation with different equations. This awkward situation may be avoided by means of a mathematical construction called a vector. Although vectors are mathematically simple and extremely useful in discussing mechanics, they were not developed in their modern form until late in the 19th century, when J. Willard Gibbs (Gibbs, J Willard) and Oliver Heaviside (Heaviside, Oliver) (of the United States and Britain, respectively) each applied vector analysis in order to help express the new laws of electromagnetism proposed by James Clerk Maxwell.
A vector is a quantity that has both magnitude and direction. It is typically represented symbolically by an arrow in the proper direction, whose length is proportional to the magnitude of the vector. Although a vector has magnitude and direction, it does not have position. A vector is not altered if it is displaced parallel to itself as long as its length is not changed.
By contrast to a vector, an ordinary quantity having magnitude but not direction is known as a scalar. In printed works vectors are often represented by boldface letters such as A or X, and scalars are represented by lightface letters, A or X. The magnitude of a vector, denoted|A|, is itself a scalar—i.e.,|A|= A.
Because vectors are different from ordinary (i.e., scalar) quantities, all mathematical operations involving vectors must be carefully defined. Addition, subtraction, three kinds of multiplication, and differentiation will be discussed here. There is no mathematical operation that corresponds to division by a vector.
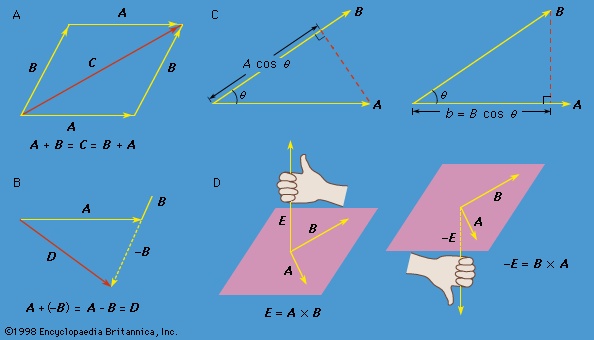 If vector A is added to vector B, the result is another vector, C, written A + B = C. The operation is performed by displacing B so that it begins where A ends, as shown in Figure 1A-->. C is then the vector that starts where A begins and ends where B ends.
If vector A is added to vector B, the result is another vector, C, written A + B = C. The operation is performed by displacing B so that it begins where A ends, as shown in Figure 1A-->. C is then the vector that starts where A begins and ends where B ends.Vector addition is defined to have the (nontrivial) property A + B = B + A. There do exist quantities having magnitude and direction that do not obey this requirement. An example is finite rotations in space. Two finite rotations of a body about different axes do not necessarily result in the same orientation if performed in the opposite order.
Vector subtraction is defined by A − B = A + (−B), where the vector −B has the same magnitude as B but the opposition direction. The idea is illustrated in Figure 1B-->.A vector may be multiplied by a scalar. Thus, for example, the vector 2A has the same direction as A but is twice as long. If the scalar has dimensions, the resulting vector still has the same direction as the original one, but the two cannot be compared in magnitude. For example, a particle moving with constant velocity v suffers a displacement s in time t given by s = vt. The vector v has been multiplied by the scalar t to give a new vector, s, which has the same direction as v but cannot be compared to v in magnitude (a displacement of one metre is neither bigger nor smaller than a velocity of one metre per second). This is a typical example of a phenomenon that might be represented by different equations in differently oriented Cartesian coordinate systems but that has a single vector equation (for all observers not moving with respect to one another).
The dot product (also known as the scalar product, or sometimes the inner product) is an operation that combines two vectors to form a scalar. The operation is written A · B. If θ is the (smaller) angle between A and B, then the result of the operation is A · B = AB cos θ. The dot product measures the extent to which two vectors are parallel. It may be thought of as multiplying the magnitude of one vector (either one) by the projection of the other upon it, as shown in Figure 1C-->. If the two vectors are perpendicular, the dot product is zero.The cross product (also known as the vector product) combines two vectors to form another vector, perpendicular to the plane of the original vectors. The operation is written A × B. If θ is the (smaller) angle between A and B, then|A × B|= AB sin θ. The direction of A × B is given by the right-hand rule: if the fingers of the right hand are made to rotate from A through θ to B, the thumb points in the direction of A × B, as shown in Figure 1D-->. The cross product is zero if the two vectors are parallel, and it is maximum in magnitude if they are perpendicular.The derivative, or rate of change, of a vector is defined in perfect analogy to the derivative of a scalar: if the vector A changes with time t, then

Special Comp-->Before going to the limit on the right-hand side of equation (1-->), the operations described are vector subtraction 【A(t + Δt) − A(t)】 and scalar multiplication (by 1/Δt). The result, dA/dt, is therefore itself a vector. Notice that, as shown in Figure 1B-->, the difference between two vectors, in this case A(t + Δt) − A(t), may be in quite a different direction than either of the vectors from which it is formed, here A(t + Δt) and A(t). As a result, dA/dt may be in a different direction than A(t).
Before going to the limit on the right-hand side of equation (1-->), the operations described are vector subtraction 【A(t + Δt) − A(t)】 and scalar multiplication (by 1/Δt). The result, dA/dt, is therefore itself a vector. Notice that, as shown in Figure 1B-->, the difference between two vectors, in this case A(t + Δt) − A(t), may be in quite a different direction than either of the vectors from which it is formed, here A(t + Δt) and A(t). As a result, dA/dt may be in a different direction than A(t). Newton's laws of motion and equilibrium
In his Principia, Newton reduced the basic principles of mechanics to three laws:
● Every body continues in its state of rest or of uniform motion in a straight line, unless it is compelled to change that state by forces impressed upon it.
● The change of motion of an object is proportional to the force impressed and is made in the direction of the straight line in which the force is impressed.
● To every action there is always opposed an equal reaction; or, the mutual actions of two bodies upon each other are always equal and directed to contrary parts.
Newton's first law is a restatement of the principle of inertia, proposed earlier by Galileo and perfected by Descartes.
The second law is the most important of the three; it may be understood very nearly to summarize all of classical mechanics. Newton used the word “motion” to mean what is today called momentum—that is, the product of mass and velocity, or p = mv, where p is the momentum, m the mass, and v the velocity of a body. The second law may then be written in the form of the equation F = dp/dt, where F is the force, the time derivative expresses Newton's “change of motion,” and the vector form of the equation assures that the change is in the same direction as the force, as the second law requires.
For a body whose mass does not change,
where a is the acceleration. Thus, Newton's second law may be put in the following form:

It is probably fair to say that equation (2-->) is the most famous equation in all of physics.
) is the most famous equation in all of physics.Newton's third law assures that when two bodies interact, regardless of the nature of the interaction, they do not produce a net force acting on the two-body system as a whole. Instead, there is an action and reaction pair of equal and opposite forces, each acting on a different body (action and reaction forces never act on the same body). The third law applies whether the bodies in question are at rest, in uniform motion, or in accelerated motion.
If a body has a net force acting on it, it undergoes accelerated motion in accordance with the second law. If there is no net force acting on a body, either because there are no forces at all or because all forces are precisely balanced by contrary forces, the body does not accelerate and may be said to be in equilibrium. Conversely, a body that is observed not to be accelerated may be deduced to have no net force acting on it.
Consider, for example, a massive object resting on a table. The object is known to be acted on by the gravitational (gravitation) force of the Earth; if the table were removed, the object would fall. It follows therefore from the fact that the object does not fall that the table exerts an upward force on the object, equal and opposite to the downward force of gravity. This upward force is not a mere physicist's bookkeeping device but rather a real physical force. The table's surface is slightly deformed by the weight of the object, causing the surface to exert a force analogous to that exerted by a coiled spring.
It is useful to recall the following distinction: the massive object exerts a downward force on the table that is equal and opposite to the upward force exerted by the table (owing to its deformation) on the object. These two forces are an action and reaction pair operating on different bodies (one on the table, the other on the object) as required by Newton's third law. On the other hand, the upward force exerted on the object by the table is balanced by a downward force exerted on the object by the Earth's gravity. These two equal and opposite forces, acting on the same body, are not related to or by Newton's third law, but they do produce the equilibrium immobile state of the body.
Motion of a particle in one dimension
Uniform motion
According to Newton's first law (also known as the principle of inertia), a body with no net force acting on it will either remain at rest or continue to move with uniform speed in a straight line, according to its initial condition of motion. In fact, in classical Newtonian mechanics, there is no important distinction between rest and uniform motion in a straight line; they may be regarded as the same state of motion seen by different observers, one moving at the same velocity as the particle, the other moving at constant velocity with respect to the particle.
Although the principle of inertia is the starting point and the fundamental assumption of classical mechanics, it is less than intuitively obvious to the untrained eye. In Aristotelian mechanics, and in ordinary experience, objects that are not being pushed tend to come to rest. The law of inertia was deduced by Galileo from his experiments with balls rolling down inclined planes, described above.
For Galileo, the principle of inertia was fundamental to his central scientific task: he had to explain how it is possible that if the Earth is really spinning on its axis and orbiting the Sun we do not sense that motion. The principle of inertia helps to provide the answer: Since we are in motion together with the Earth, and our natural tendency is to retain that motion, the Earth appears to us to be at rest. Thus, the principle of inertia, far from being a statement of the obvious, was once a central issue of scientific contention. By the time Newton had sorted out all the details, it was possible to account accurately for the small deviations from this picture caused by the fact that the motion of the Earth's surface is not uniform motion in a straight line (the effects of rotational motion are discussed below). In the Newtonian formulation, the common observation that bodies that are not pushed tend to come to rest is attributed to the fact that they have unbalanced forces acting on them, such as friction and air resistance.
As has already been stated, a body in motion may be said to have momentum equal to the product of its mass and its velocity. It also has a kind of energy that is due entirely to its motion, called kinetic energy. The kinetic energy of a body of mass m in motion with velocity v is given by

Falling bodies and uniformly accelerated motion
During the 14th century, the French scholar Nicole Oresme (Oresme, Nicholas) studied the mathematical properties of uniformly accelerated motion. He had little interest in whether that kind of motion could be observed in the realm of actual human existence, but he did discover that, if a particle is uniformly accelerated, its speed increases in direct proportion to time, and the distance it traverses is proportional to the square of the time spent accelerating. Two centuries later, Galileo repeated these same mathematical discoveries (perhaps independently) and, just as important, determined that this kind of motion is actually executed by balls rolling down inclined planes. As the incline of the plane increases, the acceleration increases, but the motion continues to be uniformly accelerated. From this observation, Galileo deduced that a body falling freely (free-fall) in the vertical direction would also have uniform acceleration. Even more remarkably, he demonstrated that, in the absence of air resistance, all bodies would fall with the same constant acceleration regardless of their mass. If the constant acceleration of any body dropped near the surface of the Earth is expressed as g, the behaviour of a body dropped from rest at height z0 and time t = 0 may be summarized by the following equations:



where z is the height of the body above the surface, v is its speed, and a is its acceleration. These equations of motion hold true until the body actually strikes the surface. The value of g is approximately 9.8 metres per second squared (m/s2).
A body of mass m at a height z0 above the surface may be said to possess a kind of energy purely by virtue of its position. This kind of energy (energy of position) is called potential energy. The gravitational potential energy is given by

Technically, it is more correct to say that this potential energy is a property of the Earth-body system rather than a property of the body itself, but this pedantic distinction can be ignored.
As the body falls to height z less than z0, its potential energy U converts to kinetic energy K = 1/2mv2. Thus, the speed v of the body at any height z is given by solving the equation

Equation (8-->) is an expression of the law of conservation of energy (energy, conservation of). It says that the sum of kinetic energy, 1/2mv2, and potential energy, mgz, at any point during the fall, is equal to the total initial energy, mgz0, before the fall began. Exactly the same dependence of speed on height could be deduced from the kinematic equations (4-->), (5-->), and (6-->) above.
) is an expression of the law of conservation of energy (energy, conservation of). It says that the sum of kinetic energy, 1/2mv2, and potential energy, mgz, at any point during the fall, is equal to the total initial energy, mgz0, before the fall began. Exactly the same dependence of speed on height could be deduced from the kinematic equations (4-->), (5-->), and (6-->) above.In order to reach the initial height z0, the body had to be given its initial potential energy by some external agency, such as a person lifting it. The process by which a body or a system obtains mechanical energy from outside of itself is called work. The increase of the energy of the body is equal to the work done on it. Work is equal to force times distance.
The force exerted by the Earth's gravity on a body of mass m may be deduced from the observation that the body, if released, will fall with acceleration g. Since force is equal to mass times acceleration, the force of gravity is given by F = mg. To lift the body to height z0, an equal and opposite (i.e., upward) force must be exerted through a distance z0. Thus, the work done is

which is equal to the potential energy that results.
If work is done by applying a force to a body that is not being acted upon by an opposing force, the body is accelerated. In this case, the work endows the body with kinetic energy rather than potential energy. The energy that the body gains is equal to the work done on it in either case. It should be noted that work, potential energy, and kinetic energy, all being aspects of the same quantity, must all have the dimensions ml2/t2.
Simple harmonic oscillations (simple harmonic motion)
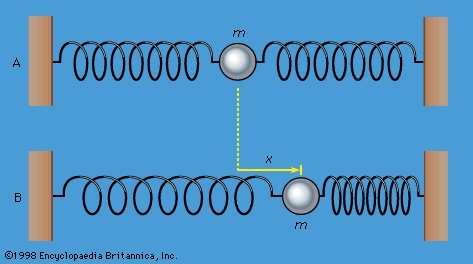 Consider a mass m held in an equilibrium position by springs, as shown in Figure 2A-->. The mass may be perturbed by displacing it to the right or left. If x is the displacement of the mass from equilibrium (Figure 2B-->), the springs exert a force F proportional to x, such that
Consider a mass m held in an equilibrium position by springs, as shown in Figure 2A-->. The mass may be perturbed by displacing it to the right or left. If x is the displacement of the mass from equilibrium (Figure 2B-->), the springs exert a force F proportional to x, such that
where k is a constant that depends on the stiffness of the springs. Equation (10-->) is called Hooke's law, and the force is called the spring force. If x is positive (displacement to the right), the resulting force is negative (to the left), and vice versa. In other words, the spring force always acts so as to restore mass back toward its equilibrium position. Moreover, the force will produce an acceleration along the x direction given by a = d2x/dt2. Thus, Newton's second law, F = ma, is applied to this case by substituting −kx for F and d2x/dt2 for a, giving −kx = m(d2x/dt2). Transposing and dividing by m yields the equation
) is called Hooke's law, and the force is called the spring force. If x is positive (displacement to the right), the resulting force is negative (to the left), and vice versa. In other words, the spring force always acts so as to restore mass back toward its equilibrium position. Moreover, the force will produce an acceleration along the x direction given by a = d2x/dt2. Thus, Newton's second law, F = ma, is applied to this case by substituting −kx for F and d2x/dt2 for a, giving −kx = m(d2x/dt2). Transposing and dividing by m yields the equation
Equation (11-->) gives the derivative—in this case the second derivative—of a quantity x in terms of the quantity itself. Such an equation is called a differential equation, meaning an equation containing derivatives. Much of the ordinary, day-to-day work of theoretical physics consists of solving differential equations. The question is, given equation (11-->), how does x depend on time?
) gives the derivative—in this case the second derivative—of a quantity x in terms of the quantity itself. Such an equation is called a differential equation, meaning an equation containing derivatives. Much of the ordinary, day-to-day work of theoretical physics consists of solving differential equations. The question is, given equation (11-->), how does x depend on time?The answer is suggested by experience. If the mass is displaced and released, it will oscillate back and forth about its equilibrium position. That is, x should be an oscillating function of t, such as a sine wave or a cosine wave. For example, x might obey a behaviour such as

Special Comp-->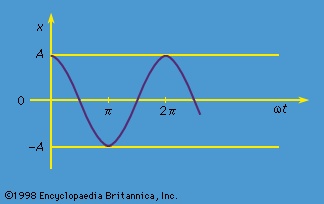 Equation (12-->) describes the behaviour sketched graphically in Figure 3-->. The mass is initially displaced a distance x = A and released at time t = 0. As time goes on, the mass oscillates (periodic motion) from A to −A and back to A again in the time it takes ωt to advance by 2π. This time is called T, the period of oscillation, so that ωT = 2π, or T = 2π/ω. The reciprocal of the period, or the frequency f, in oscillations per second, is given by f = 1/T = ω/2π. The quantity ω is called the angular frequency and is expressed in radians per second.
Equation (12-->) describes the behaviour sketched graphically in Figure 3-->. The mass is initially displaced a distance x = A and released at time t = 0. As time goes on, the mass oscillates (periodic motion) from A to −A and back to A again in the time it takes ωt to advance by 2π. This time is called T, the period of oscillation, so that ωT = 2π, or T = 2π/ω. The reciprocal of the period, or the frequency f, in oscillations per second, is given by f = 1/T = ω/2π. The quantity ω is called the angular frequency and is expressed in radians per second.
Equation (12-->) describes the behaviour sketched graphically in Figure 3-->. The mass is initially displaced a distance x = A and released at time t = 0. As time goes on, the mass oscillates (periodic motion) from A to −A and back to A again in the time it takes ωt to advance by 2π. This time is called T, the period of oscillation, so that ωT = 2π, or T = 2π/ω. The reciprocal of the period, or the frequency f, in oscillations per second, is given by f = 1/T = ω/2π. The quantity ω is called the angular frequency and is expressed in radians per second.The choice of equation (12-->) as a possible kind of behaviour satisfying the differential equation (11-->) can be tested by substituting it into equation (11-->). The first derivative of x with respect to t is
) as a possible kind of behaviour satisfying the differential equation (11-->) can be tested by substituting it into equation (11-->). The first derivative of x with respect to t is
Differentiating a second time gives
Equation (14-->) is the same as equation (11-->) if
) is the same as equation (11-->) if
Thus, subject to this condition, equation (12-->) is a correct solution to the differential equation. There are other possible correct guesses (e.g., x = A sin ωt) that differ from this one only in whether the mass is at rest or in motion at the instant t = 0.
) is a correct solution to the differential equation. There are other possible correct guesses (e.g., x = A sin ωt) that differ from this one only in whether the mass is at rest or in motion at the instant t = 0.The mass, as has been shown, oscillates from A to −A and back again. The speed, given by dx/dt, equation (13-->), is zero at A and −A, but has its maximum magnitude, equal to ωA, when x is equal to zero. Physically, after the mass is displaced from equilibrium a distance A to the right, the restoring force F pushes the mass back toward its equilibrium position, causing it to accelerate to the left. When it reaches equilibrium, there is no force acting on it at that instant, but it is moving at speed ωA, and its inertia takes it past the equilibrium position. Before it is stopped it reaches position −A, and by this time there is a force acting on it again, pushing it back toward equilibrium.
), is zero at A and −A, but has its maximum magnitude, equal to ωA, when x is equal to zero. Physically, after the mass is displaced from equilibrium a distance A to the right, the restoring force F pushes the mass back toward its equilibrium position, causing it to accelerate to the left. When it reaches equilibrium, there is no force acting on it at that instant, but it is moving at speed ωA, and its inertia takes it past the equilibrium position. Before it is stopped it reaches position −A, and by this time there is a force acting on it again, pushing it back toward equilibrium.The whole process, known as simple harmonic motion, repeats itself endlessly with a frequency given by equation (15-->). Equation (15-->) means that the stiffer the springs (i.e., the larger k), the higher the frequency (the faster the oscillations). Making the mass greater has exactly the opposite effect, slowing things down.
). Equation (15-->) means that the stiffer the springs (i.e., the larger k), the higher the frequency (the faster the oscillations). Making the mass greater has exactly the opposite effect, slowing things down.One of the most important features of harmonic motion is the fact that the frequency of the motion, ω (or f), depends only on the mass and the stiffness of the spring. It does not depend on the amplitude A of the motion. If the amplitude is increased, the mass moves faster, but the time required for a complete round trip remains the same. This fact has profound consequences, governing the nature of music and the principle of accurate timekeeping.
The potential energy of a harmonic oscillator, equal to the work an outside agent must do to push the mass from zero to x, is U = 1/2kx2. Thus, the total initial energy in the situation described above is 1/2kA2; and since the kinetic energy is always 1/2mv2, when the mass is at any point x in the oscillation,

Equation (16-->) plays exactly the role for harmonic oscillators that equation (8-->) does for falling bodies.
) plays exactly the role for harmonic oscillators that equation (8-->) does for falling bodies.It is quite generally true that harmonic oscillations result from disturbing any body or structure from a state of stable mechanical equilibrium. To understand this point, a brief discussion of stability is useful.
Consider a bowl with a marble resting inside, then consider a second, inverted bowl with a marble balanced on top. In both cases, the net force on the marble is zero. The marbles are thus in mechanical equilibrium. However, a small disturbance in the position of the marble balanced on top of the inverted bowl will cause it to roll away and not return. In such a case, the equilibrium is said to be unstable. Conversely, if the marble inside the first bowl is disturbed, gravity acts to push it back toward the bottom of the bowl. The marble inside the bowl (like the mass held by springs in Figure 2A-->) is an example of a body in stable equilibrium. If it is disturbed slightly, it executes harmonic oscillations around the bottom of the bowl rather than rolling away.This argument may be generalized by a simple mathematical argument. Consider a body or structure in mechanical equilibrium, which, when disturbed by a small amount x, finds a force acting on it that is a function of x, F(x). For small x, such a function may be written generally as a power series in x; i.e.,

where F(0) is the value of F(x) when x = (0), and a and b are constants, independent of x, determined by the nature of the system. The statement that the body is in mechanical equilibrium means that F(0) = 0, so that no force is acting on the body when it is undisturbed. Since x is small, x2 is much smaller; thus the term bx2 and all higher powers may be disregarded. This leaves F(x) = ax. Now, if a is positive, a disturbance produces a force in the same direction as the disturbance. This was the case when the marble was balanced on top of the inverted bowl. It describes unstable equilibrium. For the system to be stable, a must be negative. Thus, if a = −k, where k is some positive constant, equation (17-->) becomes F(x) = −kx, which is simply Hooke's law, equation (10-->). As has been described above, any system obeying Hooke's law is a harmonic oscillator.
) becomes F(x) = −kx, which is simply Hooke's law, equation (10-->). As has been described above, any system obeying Hooke's law is a harmonic oscillator.The generality of this argument accounts for the fact that harmonic oscillators are abundantly observed in common experience. For example, any rigid structure will oscillate at many different harmonic frequencies (frequency) corresponding to different possible distortions of its equilibrium shape. In addition, music may be produced either by disturbing the equilibrium of a stretched wire or fibre (as in the piano and violin), a stretched membrane (e.g., drums), or a rigid bar (the triangle and the xylophone) or by disturbing the density of an enclosed column of air (as in the trumpet and organ). While a fluid such as air is not rigid, its density is an example of a stable system that obeys Hooke's law and may therefore be set into harmonic oscillations.
All music would be quite different from what it is were it not for the general property of harmonic oscillators that the frequency is independent of the amplitude. Thus, instruments yield the same note (frequency) regardless of how loudly they are played (amplitude), and, equally important, the same note persists as the vibrations die away. This same property of harmonic oscillators is the underlying principle of all accurate timekeeping.
The first precise timekeeping mechanism (clock), whose principles of motion were discovered by Galileo, was the simple pendulum (see below). The accuracy of modern timekeeping has been improved dramatically by the introduction of tiny quartz crystals, whose harmonic oscillations generate electrical signals that may be incorporated into miniaturized circuits in clocks and wristwatches. All harmonic oscillators are natural timekeeping devices because they oscillate at intrinsic natural frequencies independent of amplitude. A given number of complete cycles always corresponds to the same elapsed time. Quartz crystal oscillators make more accurate clocks than pendulums do principally because they oscillate many more times per second.
Damped and forced oscillations
The simple harmonic oscillations discussed above continue forever, at constant amplitude, oscillating as shown in Figure 3--> between A and −A. Common experience indicates that real oscillators behave somewhat differently, however. Harmonic oscillations tend to die away as time goes on. This behaviour, called damping of the oscillations, is produced by forces such as friction and viscosity. These forces are known collectively as dissipative forces because they tend to dissipate the potential and kinetic energies of macroscopic bodies into the energy of the chaotic motion of atoms and molecules known as heat.Friction and viscosity are complicated phenomena whose effects cannot be represented accurately by a general equation. However, for slowly moving bodies, the dissipative forces may be represented by

where v is the speed of the body and γ is a constant coefficient, independent of dynamic quantities such as speed or displacement. Equation (18-->) is most easily understood by an argument analogous to that applied to equation (17-->) above. Fd is written as a sum of powers of v, or Fd(v) = Fd(0) + av + bv2 + · · · . When the body is at rest (v = 0), no dissipative force is expected because, if there were one, it might set the body into motion. Thus, Fd(0) = 0. The next term must be negative since dissipative forces always resist the motion. Thus, a = −γ where γ is positive. Since v2 has the same sign regardless of the direction of the motion, b must equal 0 lest it sometimes contribute a dissipative force in the same direction as the motion. The next term is proportional to v3, and it and all subsequent terms may be neglected if v is sufficiently small. So, as in equation (17-->) the power series is reduced to a single term, in this case Fd = −γv.
) is most easily understood by an argument analogous to that applied to equation (17-->) above. Fd is written as a sum of powers of v, or Fd(v) = Fd(0) + av + bv2 + · · · . When the body is at rest (v = 0), no dissipative force is expected because, if there were one, it might set the body into motion. Thus, Fd(0) = 0. The next term must be negative since dissipative forces always resist the motion. Thus, a = −γ where γ is positive. Since v2 has the same sign regardless of the direction of the motion, b must equal 0 lest it sometimes contribute a dissipative force in the same direction as the motion. The next term is proportional to v3, and it and all subsequent terms may be neglected if v is sufficiently small. So, as in equation (17-->) the power series is reduced to a single term, in this case Fd = −γv.To find the effect of a dissipative force on a harmonic oscillator, a new differential equation must be solved. The net force, or mass times acceleration, written as md2x/dt2, is set equal to the sum of the Hooke's law force, −kx, and the dissipative force, −γv = −γdx/dt. Dividing by m yields

Special Comp-->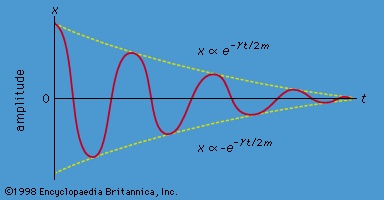 The general solution to equation (19-->) is given in the form x = Ce−γt/2m cos(ωt + θ0), where C and θ0 are arbitrary constants determined by the initial conditions. This motion, for the case in which θ0 = 0, is illustrated in Figure 4-->. As expected, the harmonic oscillations die out with time. The amplitude of the oscillations is bounded by an exponentially decreasing function of time (the dashed curves). The characteristic decay time (after which the oscillations are smaller by 1/e, where e is the base of the natural logarithms e = 2.718 . . . ) is equal to 2m/γ. The frequency of the oscillations is given by
The general solution to equation (19-->) is given in the form x = Ce−γt/2m cos(ωt + θ0), where C and θ0 are arbitrary constants determined by the initial conditions. This motion, for the case in which θ0 = 0, is illustrated in Figure 4-->. As expected, the harmonic oscillations die out with time. The amplitude of the oscillations is bounded by an exponentially decreasing function of time (the dashed curves). The characteristic decay time (after which the oscillations are smaller by 1/e, where e is the base of the natural logarithms e = 2.718 . . . ) is equal to 2m/γ. The frequency of the oscillations is given by
The general solution to equation (19-->) is given in the form x = Ce−γt/2m cos(ωt + θ0), where C and θ0 are arbitrary constants determined by the initial conditions. This motion, for the case in which θ0 = 0, is illustrated in Figure 4-->. As expected, the harmonic oscillations die out with time. The amplitude of the oscillations is bounded by an exponentially decreasing function of time (the dashed curves). The characteristic decay time (after which the oscillations are smaller by 1/e, where e is the base of the natural logarithms e = 2.718 . . . ) is equal to 2m/γ. The frequency of the oscillations is given by
Importantly, this frequency does not change as the oscillations decay.
Equation (20-->) shows that it is possible, by proper choice of γ, to turn a harmonic oscillator into a system that does not oscillate at all—that is, a system whose natural frequency is ω = 0. Such a system is said to be critically damped (damping). For example, the springs that suspend the body of an automobile cause it to be a natural harmonic oscillator. The shock absorbers (shock absorber) of the auto are devices that seek to add just enough dissipative force to make the assembly critically damped. In this way, the passengers need not go through numerous oscillations after each bump in the road.
) shows that it is possible, by proper choice of γ, to turn a harmonic oscillator into a system that does not oscillate at all—that is, a system whose natural frequency is ω = 0. Such a system is said to be critically damped (damping). For example, the springs that suspend the body of an automobile cause it to be a natural harmonic oscillator. The shock absorbers (shock absorber) of the auto are devices that seek to add just enough dissipative force to make the assembly critically damped. In this way, the passengers need not go through numerous oscillations after each bump in the road.A simple disturbance can set a harmonic oscillator into motion. Repeated disturbances can increase the amplitude of the oscillations if they are applied in synchrony with the natural frequency. Even a very small disturbance, repeated periodically at just the right frequency, can cause a very large amplitude motion to build up. This phenomenon is known as resonance.
Periodically forced oscillations may be represented mathematically by adding a term of the form a0 sin ωt to the right-hand side of equation (19-->). This term describes a force applied at frequency ω, with amplitude ma0. The result of applying such a force is to create a kind of motion that does not need to decay with time, since the energy lost to dissipative processes is replaced, over the course of each cycle, by the driving force. The amplitude of the motion depends on how close the driving frequency ω is to the natural frequency ω0 of the oscillator. Interestingly, even though dissipation is present, ω0 is not given by equation (20-->) but rather by equation (15-->): ω20 = k/m. In a graph of the amplitude of the steady state motion (i.e., long after the driving force has begun to be applied), the maximum amplitude occurs as expected at ω = ω0. The height and width of the resonance curve are governed by the damping coefficient γ. If there were no damping, the maximum amplitude would be infinite. Because small disturbances at every possible frequency are always present in the natural world, every rigid structure would shake itself to pieces if not for the presence of internal damping.
). This term describes a force applied at frequency ω, with amplitude ma0. The result of applying such a force is to create a kind of motion that does not need to decay with time, since the energy lost to dissipative processes is replaced, over the course of each cycle, by the driving force. The amplitude of the motion depends on how close the driving frequency ω is to the natural frequency ω0 of the oscillator. Interestingly, even though dissipation is present, ω0 is not given by equation (20-->) but rather by equation (15-->): ω20 = k/m. In a graph of the amplitude of the steady state motion (i.e., long after the driving force has begun to be applied), the maximum amplitude occurs as expected at ω = ω0. The height and width of the resonance curve are governed by the damping coefficient γ. If there were no damping, the maximum amplitude would be infinite. Because small disturbances at every possible frequency are always present in the natural world, every rigid structure would shake itself to pieces if not for the presence of internal damping.Resonances are not uncommon in the world of familiar experience. For example, cars often rattle at certain engine speeds, and windows sometimes rattle when an airplane flies by. Resonance is particularly important in music. For example, the sound box of a violin does its job well if it has a natural frequency of oscillation that responds resonantly to each musical note. Very strong resonances to certain notes—called “wolf notes” by musicians—occur in cheap violins and are much to be avoided. Sometimes, a glass may be broken by a singer as a result of its resonant response to a particular musical note.
Motion of a particle in two or more dimensions
Projectile motion
Galileo was quoted above pointing out with some detectable pride that none before him had realized that the curved path followed by a missile or projectile is a parabola. He had arrived at his conclusion by realizing that a body undergoing ballistic motion executes, quite independently, the motion of a freely falling body in the vertical direction and inertial motion in the horizontal direction. These considerations, and terms such as ballistic and projectile, apply to a body that, once launched, is acted upon by no force other than the Earth's gravity.
Projectile motion may be thought of as an example of motion in space—that is to say, of three-dimensional motion rather than motion along a line, or one-dimensional motion. In a suitably defined system of Cartesian coordinates, the position of the projectile at any instant may be specified by giving the values of its three coordinates, x(t), y(t), and z(t). By generally accepted convention, z(t) is used to describe the vertical direction. To a very good approximation, the motion is confined to a single vertical plane, so that for any single projectile it is possible to choose a coordinate system such that the motion is two-dimensional 【say, x(t) and z(t)】 rather than three-dimensional 【x(t), y(t), and z(t)】. It is assumed throughout this section that the range of the motion is sufficiently limited that the curvature of the Earth's surface may be ignored.
Consider a body whose vertical motion obeys equation (4-->), Galileo's law of falling bodies, which states z = z0 − 1/2gt2, while, at the same time, moving horizontally at a constant speed vx in accordance with Galileo's law of inertia. The body's horizontal motion is thus described by x(t) = vxt, which may be written in the form t = x/vx. Using this result to eliminate t from equation (4-->) gives z = z0 − 1/2g(1/vx)2x2. This latter is the equation of the trajectory of a projectile in the z–x plane, fired horizontally from an initial height z0. It has the general form
), Galileo's law of falling bodies, which states z = z0 − 1/2gt2, while, at the same time, moving horizontally at a constant speed vx in accordance with Galileo's law of inertia. The body's horizontal motion is thus described by x(t) = vxt, which may be written in the form t = x/vx. Using this result to eliminate t from equation (4-->) gives z = z0 − 1/2g(1/vx)2x2. This latter is the equation of the trajectory of a projectile in the z–x plane, fired horizontally from an initial height z0. It has the general form
Special Comp-->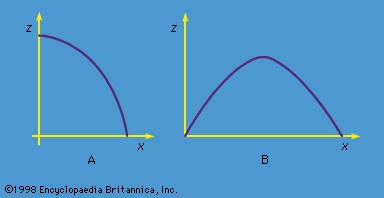 where a and b are constants. Equation (21-->) may be recognized to describe a parabola (Figure 5A-->), just as Galileo claimed. The parabolic shape of the trajectory is preserved even if the motion has an initial component of velocity in the vertical direction (Figure 5B-->).
where a and b are constants. Equation (21-->) may be recognized to describe a parabola (Figure 5A-->), just as Galileo claimed. The parabolic shape of the trajectory is preserved even if the motion has an initial component of velocity in the vertical direction (Figure 5B-->).
where a and b are constants. Equation (21-->) may be recognized to describe a parabola (Figure 5A-->), just as Galileo claimed. The parabolic shape of the trajectory is preserved even if the motion has an initial component of velocity in the vertical direction (Figure 5B-->).Energy (energy, conservation of) is conserved in projectile motion. The potential energy U(z) of the projectile is given by U(z) = mgz. The kinetic energy K is given by K = 1/2mv2, where v2 is equal to the sum of the squares of the vertical and horizontal components of velocity, or v2 = v2x + v2z.
In all of this discussion, the effects of air resistance (to say nothing of wind and other more complicated phenomena) have been neglected. These effects are seldom actually negligible. They are most nearly so for bodies that are heavy and slow-moving. All of this discussion, therefore, is of great value for understanding the underlying principles of projectile motion but of little utility for predicting the actual trajectory of, say, a cannonball once fired or even a well-hit baseball.
Motion of a pendulum
According to legend, Galileo discovered the principle of the pendulum while attending mass at the Duomo (cathedral) located in the Piazza del Duomo of Pisa, Italy. A lamp hung from the ceiling by a cable and, having just been lit, was swaying back and forth. Galileo realized that each complete cycle of the lamp took the same amount of time, compared to his own pulse, even though the amplitude of each swing was smaller than the last. As has already been shown, this property is common to all harmonic oscillators, and, indeed, Galileo's discovery led directly to the invention of the first accurate mechanical clocks. Galileo was also able to show that the period of oscillation of a simple pendulum is proportional to the square root of its length and does not depend on its mass.
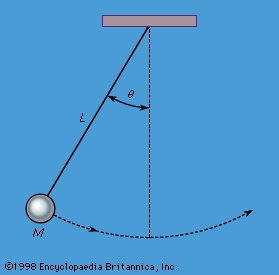 A simple pendulum is sketched in Figure 6-->. A bob of mass M is suspended by a massless cable or bar of length L from a point about which it pivots freely. The angle between the cable and the vertical is called θ. The force of gravity acting on the mass M, always equal to −Mg in the vertical direction, is a vector that may be resolved into two components, one that acts ineffectually along the cable and another, perpendicular to the cable, that tends to restore the bob to its equilibrium position directly below the point of suspension. This latter component is given by
A simple pendulum is sketched in Figure 6-->. A bob of mass M is suspended by a massless cable or bar of length L from a point about which it pivots freely. The angle between the cable and the vertical is called θ. The force of gravity acting on the mass M, always equal to −Mg in the vertical direction, is a vector that may be resolved into two components, one that acts ineffectually along the cable and another, perpendicular to the cable, that tends to restore the bob to its equilibrium position directly below the point of suspension. This latter component is given by
The bob is constrained by the cable to swing through an arc that is actually a segment of a circle of radius L. If the cable is displaced through an angle θ, the bob moves a distance Lθ along its arc (θ must be expressed in radians for this form to be correct). Thus, Newton's second law may be written

Equating equation (22-->) to equation (23-->), one sees immediately that the mass M will drop out of the resulting equation. The simple pendulum is an example of a falling body, and its dynamics do not depend on its mass for exactly the same reason that the acceleration of a falling body does not depend on its mass: both the force of gravity and the inertia of the body are proportional to the same mass, and the effects cancel one another. The equation that results (after extracting the constant L from the derivative and dividing both sides by L) is
) to equation (23-->), one sees immediately that the mass M will drop out of the resulting equation. The simple pendulum is an example of a falling body, and its dynamics do not depend on its mass for exactly the same reason that the acceleration of a falling body does not depend on its mass: both the force of gravity and the inertia of the body are proportional to the same mass, and the effects cancel one another. The equation that results (after extracting the constant L from the derivative and dividing both sides by L) is
Special Comp-->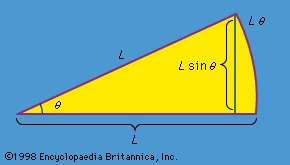 Special Comp-->If the angle θ is sufficiently small, equation (24-->) may be rewritten in a form that is both more familiar and more amenable to solution. Figure 7--> shows a segment of a circle of radius L. A radius vector at angle θ, as shown, locates a point on the circle displaced a distance Lθ along the arc. It is clear from the geometry that L sin θ and Lθ are very nearly equal for small θ. It follows then that sin θ and θ are also very nearly equal for small θ. Thus, if the analysis is restricted to small angles, then sin θ may be replaced by θ in equation (24-->) to obtain
Special Comp-->If the angle θ is sufficiently small, equation (24-->) may be rewritten in a form that is both more familiar and more amenable to solution. Figure 7--> shows a segment of a circle of radius L. A radius vector at angle θ, as shown, locates a point on the circle displaced a distance Lθ along the arc. It is clear from the geometry that L sin θ and Lθ are very nearly equal for small θ. It follows then that sin θ and θ are also very nearly equal for small θ. Thus, if the analysis is restricted to small angles, then sin θ may be replaced by θ in equation (24-->) to obtain
Special Comp-->If the angle θ is sufficiently small, equation (24-->) may be rewritten in a form that is both more familiar and more amenable to solution. Figure 7--> shows a segment of a circle of radius L. A radius vector at angle θ, as shown, locates a point on the circle displaced a distance Lθ along the arc. It is clear from the geometry that L sin θ and Lθ are very nearly equal for small θ. It follows then that sin θ and θ are also very nearly equal for small θ. Thus, if the analysis is restricted to small angles, then sin θ may be replaced by θ in equation (24-->) to obtain
Equation (25-->) should be compared with equation (11-->): d2x/dt2 = −(k/m)x. In the first case, the dynamic variable (meaning the quantity that changes with time) is θ, in the second case it is x. In both cases, the second derivative of the dynamic variable with respect to time is equal to the variable itself multiplied by a negative constant. The equations are therefore mathematically identical and have the same solution—i.e., equation (12-->), or θ = A cos ωt. In the case of the pendulum, the frequency of the oscillations is given by the constant in equation (25-->), or ω2 = g/L. The period of oscillation, T = 2π/ω, is therefore
) should be compared with equation (11-->): d2x/dt2 = −(k/m)x. In the first case, the dynamic variable (meaning the quantity that changes with time) is θ, in the second case it is x. In both cases, the second derivative of the dynamic variable with respect to time is equal to the variable itself multiplied by a negative constant. The equations are therefore mathematically identical and have the same solution—i.e., equation (12-->), or θ = A cos ωt. In the case of the pendulum, the frequency of the oscillations is given by the constant in equation (25-->), or ω2 = g/L. The period of oscillation, T = 2π/ω, is therefore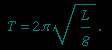
Just as Galileo concluded, the period is independent of the mass and proportional to the square root of the length.
As with most problems in physics, this discussion of the pendulum has involved a number of simplifications and approximations. Most obviously, sin θ was replaced by θ to obtain equation (25-->). This approximation is surprisingly accurate. For example, at a not-very-small angle of 17.2°, corresponding to 0.300 radian, sin θ is equal to 0.296, an error of less than 2 percent. For smaller angles, of course, the error is appreciably smaller.
). This approximation is surprisingly accurate. For example, at a not-very-small angle of 17.2°, corresponding to 0.300 radian, sin θ is equal to 0.296, an error of less than 2 percent. For smaller angles, of course, the error is appreciably smaller.The problem was also treated as if all the mass of the pendulum were concentrated at a point at the end of the cable. This approximation assumes that the mass of the bob at the end of the cable is much larger than that of the cable and that the physical size of the bob is small compared with the length of the cable. When these approximations are not sufficient, one must take into account the way in which mass is distributed in the cable and bob. This is called the physical pendulum, as opposed to the idealized model of the simple pendulum. Significantly, the period of a physical pendulum does not depend on its total mass either.
The effects of friction, air resistance, and the like have also been ignored. These dissipative forces have the same effects on the pendulum as they do on any other kind of harmonic oscillator, as discussed above. They cause the amplitude of a freely swinging pendulum to grow smaller on successive swings. Conversely, in order to keep a pendulum clock going, a mechanism is needed to restore the energy lost to dissipative forces.
Circular motion
Consider a particle moving along the perimeter of a circle at a uniform rate, such that it makes one complete revolution every hour. To describe the motion mathematically, a vector is constructed from the centre of the circle to the particle. The vector then makes one complete revolution every hour. In other words, the vector behaves exactly like the large hand on a wristwatch, an arrow of fixed length that makes one complete revolution every hour. The motion of the point of the vector is an example of uniform circular motion, and the period T of the motion is equal to one hour (T = 1 h). The arrow sweeps out an angle of 2π radians (one complete circle) per hour. This rate is called the angular frequency and is written ω = 2π h−1. Quite generally, for uniform circular motion at any rate,

These definitions and relations are the same as they are for harmonic motion, discussed above.
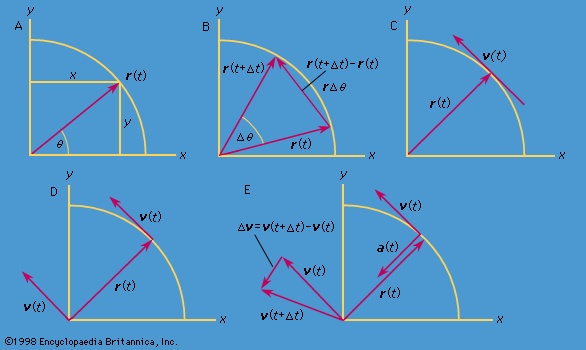 Special Comp-->Consider a coordinate system, as shown in Figure 8A-->, with the circle centred at the origin. At any instant of time, the position of the particle may be specified by giving the radius r of the circle and the angle θ between the position vector and the x-axis. Although r is constant, θ increases uniformly with time t, such that θ = ωt, or dθ/dt = ω, where ω is the angular frequency in equation (26-->). Contrary to the case of the wristwatch, however, ω is positive by convention when the rotation is in the counterclockwise sense. The vector r has x and y components given by
Special Comp-->Consider a coordinate system, as shown in Figure 8A-->, with the circle centred at the origin. At any instant of time, the position of the particle may be specified by giving the radius r of the circle and the angle θ between the position vector and the x-axis. Although r is constant, θ increases uniformly with time t, such that θ = ωt, or dθ/dt = ω, where ω is the angular frequency in equation (26-->). Contrary to the case of the wristwatch, however, ω is positive by convention when the rotation is in the counterclockwise sense. The vector r has x and y components given by

One meaning of equations (27-->) and (28-->) is that, when a particle undergoes uniform circular motion, its x and y components each undergo simple harmonic motion. They are, however, not in phase with one another: at the instant when x has its maximum amplitude (say, at θ = 0), y has zero amplitude, and vice versa.
) and (28-->) is that, when a particle undergoes uniform circular motion, its x and y components each undergo simple harmonic motion. They are, however, not in phase with one another: at the instant when x has its maximum amplitude (say, at θ = 0), y has zero amplitude, and vice versa.In a short time, Δt, the particle moves rΔθ along the circumference of the circle, as shown in Figure 8B-->. The average speed of the particle is thus given by
The average velocity of the particle is a vector given by
 This operation of vector subtraction is indicated in Figure 8B-->. It yields a vector that is nearly perpendicular to r(t) and r(t + Δt). Indeed, the instantaneous velocity, found by allowing Δt to shrink to zero, is a vector v that is perpendicular to r at every instant and whose magnitude is
This operation of vector subtraction is indicated in Figure 8B-->. It yields a vector that is nearly perpendicular to r(t) and r(t + Δt). Indeed, the instantaneous velocity, found by allowing Δt to shrink to zero, is a vector v that is perpendicular to r at every instant and whose magnitude is The relationship between r and v is shown in Figure 8C-->. It means that the particle's instantaneous velocity is always tangent to the circle.
The relationship between r and v is shown in Figure 8C-->. It means that the particle's instantaneous velocity is always tangent to the circle.Notice that, just as the position vector r may be described in terms of the components x and y given by equations (27-->) and (28-->), the velocity vector v may be described in terms of its projections on the x and y axes, given by
) and (28-->), the velocity vector v may be described in terms of its projections on the x and y axes, given by
 Imagine a new coordinate system, in which a vector of length ωr extends from the origin and points at all times in the same direction as v. This construction is shown in Figure 8D-->. Each time the particle sweeps out a complete circle, this vector also sweeps out a complete circle. In fact, its point is executing uniform circular motion at the same angular frequency as the particle itself. Because vectors have magnitude and direction, but not position in space, the vector that has been constructed is the velocity v. The velocity of the particle is itself undergoing uniform circular motion at angular frequency ω.
Imagine a new coordinate system, in which a vector of length ωr extends from the origin and points at all times in the same direction as v. This construction is shown in Figure 8D-->. Each time the particle sweeps out a complete circle, this vector also sweeps out a complete circle. In fact, its point is executing uniform circular motion at the same angular frequency as the particle itself. Because vectors have magnitude and direction, but not position in space, the vector that has been constructed is the velocity v. The velocity of the particle is itself undergoing uniform circular motion at angular frequency ω.Although the speed of the particle is constant, the particle is nevertheless accelerated, because its velocity is constantly changing direction. The acceleration a is given by

Special Comp-->Special Comp-->Since v is a vector of length rω undergoing uniform circular motion, equations (29-->) and (30-->) may be repeated, as illustrated in Figure 8E-->, giving
Special Comp-->Since v is a vector of length rω undergoing uniform circular motion, equations (29-->) and (30-->) may be repeated, as illustrated in Figure 8E-->, giving

Thus, one may conclude that the instantaneous acceleration is always perpendicular to v and its magnitude is

Since v is perpendicular to r, and a is perpendicular to v, the vector a is rotated 180° with respect to r. In other words, the acceleration is parallel to r but in the opposite direction. The same conclusion may be reached by realizing that a has x and y components given by


similar to equations (32-->) and (33-->). When equations (38-->) and (39-->) are compared with equations (27-->) and (28-->) for x and y, it is clear that the components of a are just those of r multiplied by −ω2, so that a = −ω2r. This acceleration is called the centripetal acceleration, meaning that it is inward, pointing along the radius vector toward the centre of the circle. It is sometimes useful to express the centripetal acceleration in terms of the speed v. Using v = ωr, one can write
) and (33-->). When equations (38-->) and (39-->) are compared with equations (27-->) and (28-->) for x and y, it is clear that the components of a are just those of r multiplied by −ω2, so that a = −ω2r. This acceleration is called the centripetal acceleration, meaning that it is inward, pointing along the radius vector toward the centre of the circle. It is sometimes useful to express the centripetal acceleration in terms of the speed v. Using v = ωr, one can write
Circular orbits
The detailed behaviour of real orbits is the concern of celestial mechanics (see the article celestial mechanics). This section treats only the idealized, uniform circular orbit of a planet such as the Earth about a central body such as the Sun. In fact, the Earth's orbit about the Sun is not quite exactly uniformly circular, but it is a close enough approximation for the purposes of this discussion.
Special Comp-->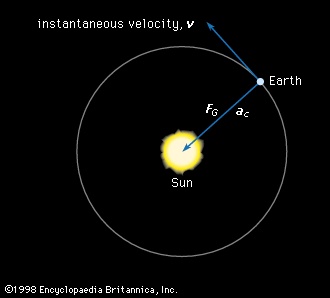 A body in uniform circular motion undergoes at all times a centripetal acceleration given by equation (40-->). According to Newton's second law, a force is required to produce this acceleration. In the case of an orbiting planet, the force is gravity (gravitation). The situation is illustrated in Figure 9-->. The gravitational attraction of the Sun is an inward (centripetal) force acting on the Earth. This force produces the centripetal acceleration of the orbital motion.
A body in uniform circular motion undergoes at all times a centripetal acceleration given by equation (40-->). According to Newton's second law, a force is required to produce this acceleration. In the case of an orbiting planet, the force is gravity (gravitation). The situation is illustrated in Figure 9-->. The gravitational attraction of the Sun is an inward (centripetal) force acting on the Earth. This force produces the centripetal acceleration of the orbital motion.
A body in uniform circular motion undergoes at all times a centripetal acceleration given by equation (40-->). According to Newton's second law, a force is required to produce this acceleration. In the case of an orbiting planet, the force is gravity (gravitation). The situation is illustrated in Figure 9-->. The gravitational attraction of the Sun is an inward (centripetal) force acting on the Earth. This force produces the centripetal acceleration of the orbital motion.Before these ideas are expressed quantitatively, an understanding of why a force is needed to maintain a body in an orbit of constant speed is useful. The reason is that, at each instant, the velocity of the planet is tangent to the orbit. In the absence of gravity, the planet would obey the law of inertia (Newton's first law) and fly off in a straight line in the direction of the velocity at constant speed. The force of gravity serves to overcome the inertial tendency of the planet, thereby keeping it in orbit.
The gravitational (Newton's law of gravitation) force between two bodies such as the Sun and the Earth is given by

where MS and ME are the masses of the Sun and the Earth, respectively, r is the distance between their centres, and G is a universal constant equal to 6.672 × 10−11 Nm2/kg2 (Newton metres squared per kilogram squared). The force acts along the direction connecting the two bodies (i.e., along the radius vector of the uniform circular motion), and the minus sign signifies that the force is attractive, acting to pull the Earth toward the Sun.
To an observer on the surface of the Earth, the planet appears to be at rest at (approximately) a constant distance from the Sun. It would appear to the observer, therefore, that any force (such as the Sun's gravity) acting on the Earth must be balanced by an equal and opposite force that keeps the Earth in equilibrium. In other words, if gravity is trying to pull the Earth into the Sun, some opposing force must be present to prevent that from happening. In reality, no such force exists. The Earth is in freely accelerated motion caused by an unbalanced force. The apparent force, known in mechanics as a pseudoforce (inertial force), is due to the fact that the observer is actually in accelerated motion. In the case of orbital motion, the outward pseudoforce that balances gravity is called the centrifugal force.
For a uniform circular orbit, gravity produces an inward acceleration given by equation (40-->), a = −v2/r. The pseudoforce f needed to balance this acceleration is just equal to the mass of the Earth times an equal and opposite acceleration, or f = MEv2/r. The earthbound observer then believes that there is no net force acting on the planet—i.e., that F + f = 0, where F is the force of gravity given by equation (41-->). Combining these equations yields a relation between the speed v of a planet and its distance r from the Sun:
), a = −v2/r. The pseudoforce f needed to balance this acceleration is just equal to the mass of the Earth times an equal and opposite acceleration, or f = MEv2/r. The earthbound observer then believes that there is no net force acting on the planet—i.e., that F + f = 0, where F is the force of gravity given by equation (41-->). Combining these equations yields a relation between the speed v of a planet and its distance r from the Sun:
It should be noted that the speed does not depend on the mass of the planet. This occurs for exactly the same reason that all bodies fall toward Earth with the same acceleration and that the period of a pendulum is independent of its mass. An orbiting planet is in fact a freely falling body.
Equation (42-->) is a special case (for circular orbits) of Kepler's third law, which is discussed in the article celestial mechanics. Using the fact that v = 2πr/T, where 2πr is the circumference of the orbit and T is the time to make a complete orbit (i.e., T is one year in the life of the planet), it is easy to show that T2 = (4π2/GMS)r3. This relation also may be applied to satellites in circular orbit around the Earth (in which case, ME must be substituted for MS) or in orbit around any other central body.
) is a special case (for circular orbits) of Kepler's third law, which is discussed in the article celestial mechanics. Using the fact that v = 2πr/T, where 2πr is the circumference of the orbit and T is the time to make a complete orbit (i.e., T is one year in the life of the planet), it is easy to show that T2 = (4π2/GMS)r3. This relation also may be applied to satellites in circular orbit around the Earth (in which case, ME must be substituted for MS) or in orbit around any other central body.Angular momentum and torque
A particle of mass m and velocity v has linear momentum p = mv. The particle may also have angular momentum L with respect to a given point in space. If r is the vector from the point to the particle, then

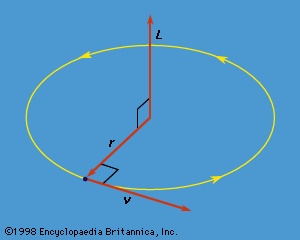 Notice that angular momentum is always a vector perpendicular to the plane defined by the vectors r and p (or v). For example, if the particle (or a planet) is in a circular orbit, its angular momentum with respect to the centre of the circle is perpendicular to the plane of the orbit and in the direction given by the vector cross product right-hand rule, as shown in Figure 10-->. Moreover, since in the case of a circular orbit, r is perpendicular to p (or v), the magnitude of L is simply
Notice that angular momentum is always a vector perpendicular to the plane defined by the vectors r and p (or v). For example, if the particle (or a planet) is in a circular orbit, its angular momentum with respect to the centre of the circle is perpendicular to the plane of the orbit and in the direction given by the vector cross product right-hand rule, as shown in Figure 10-->. Moreover, since in the case of a circular orbit, r is perpendicular to p (or v), the magnitude of L is simply
The significance of angular momentum arises from its derivative with respect to time,

where p has been replaced by mv and the constant m has been factored out. Using the product rule of differential calculus,

In the first term on the right-hand side of equation (46-->), dr/dt is simply the velocity v, leaving v × v. Since the cross product of any vector with itself is always zero, that term drops out, leaving
), dr/dt is simply the velocity v, leaving v × v. Since the cross product of any vector with itself is always zero, that term drops out, leaving
Here, dv/dt is the acceleration a of the particle. Thus, if equation (47-->) is multiplied by m, the left-hand side becomes dL/dt, as in equation (45-->), and the right-hand side may be written r × ma. Since, according to Newton's second law, ma is equal to F, the net force acting on the particle, the result is
) is multiplied by m, the left-hand side becomes dL/dt, as in equation (45-->), and the right-hand side may be written r × ma. Since, according to Newton's second law, ma is equal to F, the net force acting on the particle, the result is
Equation (48-->) means that any change in the angular momentum of a particle must be produced by a force that is not acting along the same direction as r. One particularly important application is the solar system. Each planet is held in its orbit by its gravitational attraction to the Sun, a force that acts along the vector from the Sun to the planet. Thus the force of gravity cannot change the angular momentum of any planet with respect to the Sun. Therefore, each planet has constant angular momentum with respect to the Sun. This conclusion is correct even though the real orbits of the planets are not circles but ellipses.
) means that any change in the angular momentum of a particle must be produced by a force that is not acting along the same direction as r. One particularly important application is the solar system. Each planet is held in its orbit by its gravitational attraction to the Sun, a force that acts along the vector from the Sun to the planet. Thus the force of gravity cannot change the angular momentum of any planet with respect to the Sun. Therefore, each planet has constant angular momentum with respect to the Sun. This conclusion is correct even though the real orbits of the planets are not circles but ellipses.The quantity r × F is called the torque τ. Torque may be thought of as a kind of twisting force, the kind needed to tighten a bolt or to set a body into rotation. Using this definition, equation (48-->) may be rewritten
) may be rewritten
Equation (49-->) means that if there is no torque acting on a particle, its angular momentum is constant, or conserved. Suppose, however, that some agent applies a force Fa to the particle resulting in a torque equal to r × Fa. According to Newton's third law, the particle must apply a force −Fa to the agent. Thus there is a torque equal to −r × Fa acting on the agent. The torque on the particle causes its angular momentum to change at a rate given by dL/dt = r × Fa. However, the angular momentum La of the agent is changing at the rate dLa/dt = −r × Fa. Therefore, dL/dt + dLa/dt = 0, meaning that the total angular momentum of particle plus agent is constant, or conserved. This principle may be generalized to include all interactions between bodies of any kind, acting by way of forces of any kind. Total angular momentum is always conserved. The law of conservation of angular momentum is one of the most important principles in all of physics.
) means that if there is no torque acting on a particle, its angular momentum is constant, or conserved. Suppose, however, that some agent applies a force Fa to the particle resulting in a torque equal to r × Fa. According to Newton's third law, the particle must apply a force −Fa to the agent. Thus there is a torque equal to −r × Fa acting on the agent. The torque on the particle causes its angular momentum to change at a rate given by dL/dt = r × Fa. However, the angular momentum La of the agent is changing at the rate dLa/dt = −r × Fa. Therefore, dL/dt + dLa/dt = 0, meaning that the total angular momentum of particle plus agent is constant, or conserved. This principle may be generalized to include all interactions between bodies of any kind, acting by way of forces of any kind. Total angular momentum is always conserved. The law of conservation of angular momentum is one of the most important principles in all of physics.Motion of a group of particles
Centre of mass
The word particle has been used in this article to signify an object whose entire mass is concentrated at a point in space. In the real world, however, there are no particles of this kind. All real bodies have sizes and shapes. Furthermore, as Newton believed and is now known, all bodies are in fact compounded of smaller bodies called atoms. Therefore, the science of mechanics must deal not only with particles but also with more complex bodies that may be thought of as collections of particles.
To take a specific example, the orbit of a planet around the Sun was discussed earlier as if the planet and the Sun were each concentrated at a point in space. In reality, of course, each is a substantial body. However, because each is nearly spherical in shape, it turns out to be permissible, for the purposes of this problem, to treat each body as if its mass were concentrated at its centre. This is an example of an idea that is often useful in discussing bodies of all kinds: the centre of mass. The centre of mass of a uniform sphere is located at the centre of the sphere. For many purposes (such as the one cited above) the sphere may be treated as if all its mass were concentrated at its centre of mass.
To extend the idea further, consider the Earth and the Sun not as two separate bodies but as a single system of two bodies interacting with one another by means of the force of gravity. In the previous discussion of circular orbits, the Sun was assumed to be at rest at the centre of the orbit, but, according to Newton's third law, it must actually be accelerated by a force due to the Earth that is equal and opposite to the force that the Sun exerts on the Earth. In other words, considering only the Sun and Earth (ignoring, for example, all the other planets), if MS and ME are, respectively, the masses of the Sun and the Earth, and if aS and aE are their respective accelerations, then combining Newton's second and third laws results in the equation MSaS = −MEaE. Writing each a as dv/dt, this equation is easily manipulated to give


This remarkable result means that, as the Earth orbits the Sun and the Sun moves in response to the Earth's gravitational attraction, the entire two-body system has constant linear momentum, moving in a straight line at constant speed. Without any loss of generality, one can imagine observing the system from a frame of reference (reference frame) moving along with that same speed and direction. This is sometimes called the centre-of-mass frame. In this frame, the momentum of the two-body system—i.e., the constant in equation (51-->)—is equal to zero. Writing each of the v's as the corresponding dr/dt, equation (51-->) may be expressed in the form
)—is equal to zero. Writing each of the v's as the corresponding dr/dt, equation (51-->) may be expressed in the form
Thus, MSrS and MErE are two vectors whose vector sum does not change with time. The sum is defined to be the constant vector MR, where M is the total mass of the system and equals MS + ME. Thus,

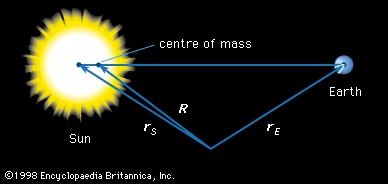 This procedure defines a constant vector R, from any arbitrarily chosen point in space. The relation between vectors R, rS, and rE is shown in Figure 11-->. The fact that R is constant (although rS and rE are not constant) means that, rather than the Earth orbiting the Sun, the Earth and Sun are both orbiting an imaginary point fixed in space. This point is known as the centre of mass of the two-body system.
This procedure defines a constant vector R, from any arbitrarily chosen point in space. The relation between vectors R, rS, and rE is shown in Figure 11-->. The fact that R is constant (although rS and rE are not constant) means that, rather than the Earth orbiting the Sun, the Earth and Sun are both orbiting an imaginary point fixed in space. This point is known as the centre of mass of the two-body system.Knowing the masses of the two bodies (MS = 1.99 × 1030 kilograms, ME = 5.98 × 1024 kilograms), it is easy to find the position of the centre of mass. The origin of the coordinate system may be chosen to be located at the centre of mass merely by defining R = 0. Then rS = (ME/MS) rE ≈ 450 kilometres, when rE is rounded to 1.5 × 108 km. A few hundred kilometres is so small compared to rE that, for all practical purposes, no appreciable error occurs when rS is ignored and the Sun is assumed to be stationary at the centre of the orbit.
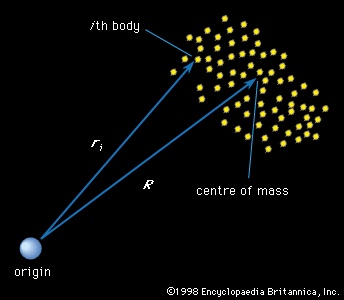 With this example as a guide, it is now possible to define the centre of mass of any collection of bodies. Assume that there are N bodies altogether, each labeled with numbers ranging from 1 to N, and that the vector from an arbitrary origin to the ith body—where i is some number between 1 and N—is ri, as shown in Figure 12-->. Let the mass of the ith body be mi. Then the total mass of the N-body system is
With this example as a guide, it is now possible to define the centre of mass of any collection of bodies. Assume that there are N bodies altogether, each labeled with numbers ranging from 1 to N, and that the vector from an arbitrary origin to the ith body—where i is some number between 1 and N—is ri, as shown in Figure 12-->. Let the mass of the ith body be mi. Then the total mass of the N-body system is
and the centre of mass of the system is found at the end of a vector R given by
 Special Comp-->as illustrated in Figure 12-->. This definition applies regardless of whether the N bodies making up the system are the stars in a galaxy, the atoms in a rigid body, larger and arbitrarily chosen segments of a rigid body, or any other system of masses. According to equation (55-->), the vector to the centre of mass of any system is a kind of weighted average of the vectors to all the components of the system.
Special Comp-->as illustrated in Figure 12-->. This definition applies regardless of whether the N bodies making up the system are the stars in a galaxy, the atoms in a rigid body, larger and arbitrarily chosen segments of a rigid body, or any other system of masses. According to equation (55-->), the vector to the centre of mass of any system is a kind of weighted average of the vectors to all the components of the system.As will be demonstrated in the sections that follow, the statics and dynamics of many complicated bodies or systems may often be understood by simply applying Newton's laws as if the system's mass were concentrated at the centre of mass.
Conservation of momentum (momentum, conservation of)
Newton's second law, in its most general form, says that the rate of a change of a particle's momentum p is given by the force acting on the particle; i.e., F = dp/dt. If there is no force acting on the particle, then, since dp/dt = 0, p must be constant, or conserved. This observation is merely a restatement of Newton's first law, the principle of inertia: if there is no force acting on a body, it moves at constant speed in a straight line.
Now suppose that an external agent applies a force Fa to the particle so that p changes according to

According to Newton's third law, the particle must apply an equal and opposite force −Fa to the external agent. The momentum pa of the external agent therefore changes according to

Adding together equations (56-->) and (57-->) results in the equation
) and (57-->) results in the equation
The force applied by the external agent changes the momentum of the particle, but at the same time the momentum of the external agent must also change in such a way that the total momentum of both together is constant, or conserved. This idea may be generalized to give the law of conservation of momentum: in all the interactions between all the bodies in the universe, total momentum is always conserved.
It is useful in this light to examine the behaviour of a complicated system of many parts. The centre of mass of the system may be found using equation (55-->). Differentiating with respect to time gives
). Differentiating with respect to time gives
where v = dR/dt and vi = dri/dt. Note that mivi is the momentum of the ith part of the system, and mv is the momentum that the system would have if all its mass (i.e., m) were concentrated at its centre of mass, the point whose velocity is v. Thus, the momentum associated with the centre of mass is the sum of the momenta of the parts.
Suppose now that there is no external agent applying a force to the entire system. Then the only forces acting on the system are those exerted by the parts on one another. These forces may accelerate the individual parts. Differentiating equation (59-->) with respect to time gives
) with respect to time gives
where Fi is the net force, or the sum of the forces, exerted by all the other parts of the body on the ith part. Fi is defined mathematically by the equation

where Fij represents the force on body i due to body j (the force on body i due to itself, Fii, is zero). The motion of the centre of mass is then given by the complicated-looking formula
This complicated formula may be greatly simplified, however, by noting that Newton's third law requires that for every force Fij exerted by the jth body on the ith body, there is an equal and opposite force −Fij exerted by the ith body on the jth body. In other words, every term in the double sum has an equal and opposite term. The double summation on the right-hand side of equation (61-->) always adds up to zero. This result is true regardless of the complexity of the system, the nature of the forces acting between the parts, or the motions of the parts. In short, in the absence of external forces acting on the system as a whole, mdv/dt = 0, which means that the momentum of the centre of mass of the system is always conserved. Having determined that momentum is conserved whether or not there is an external force acting, one may conclude that the total momentum of the universe is always conserved.
) always adds up to zero. This result is true regardless of the complexity of the system, the nature of the forces acting between the parts, or the motions of the parts. In short, in the absence of external forces acting on the system as a whole, mdv/dt = 0, which means that the momentum of the centre of mass of the system is always conserved. Having determined that momentum is conserved whether or not there is an external force acting, one may conclude that the total momentum of the universe is always conserved.Collisions (collision)
A collision is an encounter between two bodies that alters at least one of their courses. Altering the course of a body requires that a force be applied to it. Thus, each body exerts a force on the other. These forces of interaction may operate at some distance, as do the gravitational and electromagnetic forces, or the bodies may appear to make physical contact. However, even apparent contact between two bodies is only a macroscopic manifestation of microscopic forces that act between atoms some distance apart. There is no fundamental distinction between physical contact and interaction at a distance.
The importance of understanding the mechanics of collisions is obvious to anyone who has ever driven an automobile. In modern physics, however, collisions are important for a different reason. The current understanding of the subatomic particles of which atoms are composed is derived entirely from studying the results of collisions among them. Thus, in modern physics, the description of collisions is a significant part of the understanding of matter. These descriptions are quantum mechanical rather than classical, but they are nevertheless closely based on principles that arise out of classical mechanics.
It is possible in principle to predict the result of a collision using Newton's second law directly. Suppose that two bodies are going to collide and that F, the force of interaction between them, is known to be a function of r, the distance between them. Then, if it is known that, say, one particle has incident momentum p, the problem is solved if the final momentum p + Δp can be determined. Inverting Newton's second law, F = dp/dt, the change in momentum is given by

This integral is known as the impulse imparted to the particle. In order to perform the integral, it is necessary to know r at all times so that F may be known at all times. More realistically, Δp is the sum of a series of small steps, such that

where F depends on the instantaneous distance between the particles. Because p = mv = mdr/dt, the change in r in this step is

At the next step, there is a new distance, r + δr, giving a new value of the force in equation (64-->) and a new momentum, p + δp, in equation (65-->). This method of analyzing collisions is used in numerical calculations on digital computers.
) and a new momentum, p + δp, in equation (65-->). This method of analyzing collisions is used in numerical calculations on digital computers.To predict the result of a collision analytically (rather than numerically) it is often most useful to apply conservation laws (conservation law). In any collision (as in any other phenomenon), energy, momentum, and angular momentum are always conserved. Judicious application of these laws may be extremely useful because they do not depend in any way on the detailed nature of the interaction (i.e., the force as a function of distance).
This point can be illustrated by the following example. A collision is to take place between two bodies of the same mass m. One of the bodies is initially at rest (its momentum is zero). The other has initial momentum p0. After the collision, the body previously at rest has momentum (momentum, conservation of) p1, and the body initially in motion has momentum p2. Since momentum is conserved, the total momentum after the collision, p1 + p2, must be equal to the total momentum before the collision, p0; that is,

Special Comp-->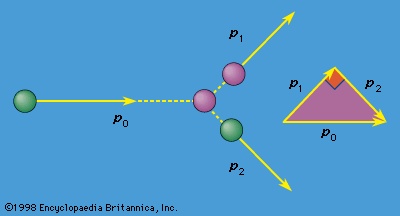 Equation (66-->) is the equation of a vector triangle, as shown in Figure 13-->. However, p1 and p2 are not determined by this condition; they are only constrained by it.
Equation (66-->) is the equation of a vector triangle, as shown in Figure 13-->. However, p1 and p2 are not determined by this condition; they are only constrained by it.
Equation (66-->) is the equation of a vector triangle, as shown in Figure 13-->. However, p1 and p2 are not determined by this condition; they are only constrained by it.Although energy (energy, conservation of) is always conserved, the kinetic energy of the incident body is not always converted entirely into the kinetic energy of the two bodies after the collision. For example, if the bodies are microscopic (say, two identical atoms), the collision may cause one or both to be excited into a state of higher internal energy than it started with. Such an event would leave correspondingly less kinetic energy for the outgoing atoms. In fact, it is precisely by studying the trajectories of outgoing projectiles in collisions like these that physicists are able to determine the possible excited states of microscopic particles.
In a collision between macroscopic objects, some of the kinetic energy is always converted to heat. Heat is the energy of random vibrations of the atoms and molecules that constitute the bodies. However, if the amount of heat is negligible compared to the initial kinetic energy, it may be ignored. Such a collision is said to be elastic.
Suppose the collision described above between two bodies, each of mass m, is between billiard (billiards) balls, and suppose it is elastic (a reasonably good approximation of real billiard balls). The kinetic energy of the incident ball is then equal to the sum of the kinetic energies of the outgoing balls. According to equation (3-->), the kinetic energy of a moving object is given by K = 1/2mv2, where v is the speed of the ball (technically, the energy associated with the fact that the ball is rolling as well as translating is ignored here; see below Rotation about a moving axis (mechanics)). Equation (3-->) may be written in a particularly useful form by recognizing that since p = mv
), the kinetic energy of a moving object is given by K = 1/2mv2, where v is the speed of the ball (technically, the energy associated with the fact that the ball is rolling as well as translating is ignored here; see below Rotation about a moving axis (mechanics)). Equation (3-->) may be written in a particularly useful form by recognizing that since p = mv
Then the conservation of kinetic energy may be written

or, canceling the factors 2m,

Comparing this result with equation (66-->) shows that the vector triangle is pythagorean; p1 and p2 are perpendicular. This result is well known to all experienced pool players. Notice that it was possible to arrive at this result without any knowledge of the forces that act when billiard balls collide.
) shows that the vector triangle is pythagorean; p1 and p2 are perpendicular. This result is well known to all experienced pool players. Notice that it was possible to arrive at this result without any knowledge of the forces that act when billiard balls collide.Relative motion
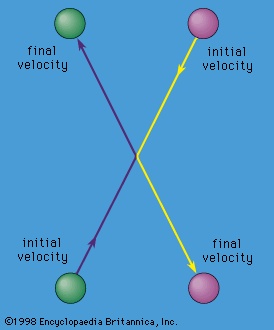 A collision between two bodies can always be described in a frame of reference (reference frame) in which the total momentum is zero. This is the centre-of-mass (or centre-of-momentum) frame mentioned earlier. Then, for example, in the collision between two bodies of the same mass discussed above, the two bodies always have equal and opposite velocities, as shown in Figure 14-->. It should be noted that, in this frame of reference, the outgoing momenta are antiparallel and not perpendicular.
A collision between two bodies can always be described in a frame of reference (reference frame) in which the total momentum is zero. This is the centre-of-mass (or centre-of-momentum) frame mentioned earlier. Then, for example, in the collision between two bodies of the same mass discussed above, the two bodies always have equal and opposite velocities, as shown in Figure 14-->. It should be noted that, in this frame of reference, the outgoing momenta are antiparallel and not perpendicular.Any collection of bodies may similarly be described in a frame of reference in which the total momentum is zero. This frame is simply the one in which the centre of mass is at rest. This fact is easily seen by differentiating equation (55-->) with respect to time, giving
) with respect to time, giving
The right-hand side is the sum of the momenta of all the bodies. It is equal to zero if the velocity of the centre of mass, dR/dt, is equal to zero.
If Newton's second law is correct in any frame of reference, it will also appear to be correct to an observer moving with any constant velocity with respect to that frame. This principle, called the principle of Galilean relativity, is true because, to the moving observer, the same constant velocity seems to have been added to the velocity of every particle in the system. This change does not affect the accelerations of the particles (since the added velocity is constant, not accelerated) and therefore does not change the apparent force (mass times acceleration) acting on each particle. That is why it is permissible to describe a problem from the centre-of-momentum frame (provided that the centre of mass is not accelerated) or from any other frame moving at constant velocity with respect to it.
If this principle is strictly correct, the fundamental forces of physics should not contain any particular speed. This must be true because the speed of any object will be different to observers in different but equally good frames of reference, but the force should always be the same. It turns out, according to the theory of James Clerk Maxwell (Maxwell, James Clerk), that there is an intrinsic speed in the force laws of electricity and magnetism: (magnetism) the speed of light appears in the forces between electric charges and between magnetic poles. This discrepancy was ultimately resolved by Albert Einstein (Einstein, Albert)'s special theory of relativity. According to the special theory of relativity, Newtonian mechanics breaks down when the relative speed between particles approaches the speed of light (see the article relativistic mechanics).
Coupled oscillators
In the section on simple harmonic oscillators, the motion of a single particle held in place by springs was considered. In this section, the motion of a group of particles bound by springs to one another is discussed. The solutions of this seemingly academic problem have far-reaching implications in many fields of physics. For example, a system of particles held together by springs turns out to be a useful model of the behaviour of atoms mutually bound in a crystalline solid.
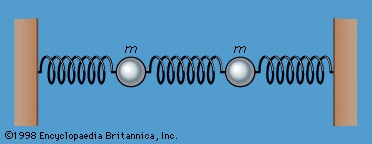 To begin with a simple case, consider two particles in a line, as shown in Figure 15-->. Each particle has mass m, each spring has spring constant k, and motion is restricted to the horizontal, or x, direction. Even this elementary system is capable of surprising behaviour, however. For instance, if one particle is held in place while the other is displaced (displacement), and then both are released, the displaced particle immediately begins to execute simple harmonic motion. This motion, by stretching the spring between the particles, starts to excite the second particle into motion. Gradually the energy of motion passes from the first particle to the second until a point is reached at which the first particle is at rest and only the second is oscillating. Then the process starts all over again, the energy passing in the opposite direction.
To begin with a simple case, consider two particles in a line, as shown in Figure 15-->. Each particle has mass m, each spring has spring constant k, and motion is restricted to the horizontal, or x, direction. Even this elementary system is capable of surprising behaviour, however. For instance, if one particle is held in place while the other is displaced (displacement), and then both are released, the displaced particle immediately begins to execute simple harmonic motion. This motion, by stretching the spring between the particles, starts to excite the second particle into motion. Gradually the energy of motion passes from the first particle to the second until a point is reached at which the first particle is at rest and only the second is oscillating. Then the process starts all over again, the energy passing in the opposite direction.To analyze the possible motions of the system, one writes equations similar to equation (11-->), giving the acceleration of each particle owing to the forces acting on it. There is one equation for each particle (two equations in this case). The force on each particle depends not only on its displacement from its equilibrium position but also on its distance from the other particle, since the spring between them stretches or compresses according to that distance. For this reason the motions are coupled, the solution of each equation (the motion of each particle) depending on the solution of the other (the motion of the other).
), giving the acceleration of each particle owing to the forces acting on it. There is one equation for each particle (two equations in this case). The force on each particle depends not only on its displacement from its equilibrium position but also on its distance from the other particle, since the spring between them stretches or compresses according to that distance. For this reason the motions are coupled, the solution of each equation (the motion of each particle) depending on the solution of the other (the motion of the other).Analyzing the system yields the fact that there are two special states of motion in which both particles are always in oscillation with the same frequency. In one state, the two particles oscillate in opposite directions with equal and opposite displacements from equilibrium at all times. In the other state, both particles move together, so that the spring between them is never stretched or compressed. The first of these motions has higher frequency than the second because the centre spring contributes an increase in the restoring force.
These two collective motions, at different, definite frequencies, are known as the normal modes of the system.
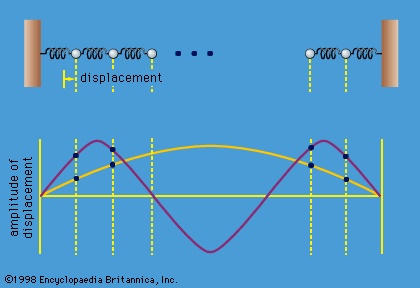 If a third particle is inserted into the system together with another spring, there will be three equations to solve, and the result will be three normal modes. A large number N of particles in a line will have N normal modes. Each normal mode has a definite frequency at which all the particles oscillate. In the highest frequency mode each particle moves in the direction opposite to both of its neighbours. In the lowest frequency mode, neighbours move almost together, barely disturbing the springs between them. Starting from one end, the amplitude of the motion gradually builds up, each particle moving a bit more than the one before, reaching a maximum at the centre, and then decreasing again. A plot of the amplitudes, shown in Figure 16-->, basically describes one-half of a sine wave from one end of the system to the other. The next mode is a full sine wave, then 3/2 of a sine wave, and so on to the highest frequency mode, which may be visualized as N/2 sine waves. If the vibrations were up and down rather than side to side, these modes would be identical to the fundamental and harmonic vibrations excited by plucking a guitar string.
If a third particle is inserted into the system together with another spring, there will be three equations to solve, and the result will be three normal modes. A large number N of particles in a line will have N normal modes. Each normal mode has a definite frequency at which all the particles oscillate. In the highest frequency mode each particle moves in the direction opposite to both of its neighbours. In the lowest frequency mode, neighbours move almost together, barely disturbing the springs between them. Starting from one end, the amplitude of the motion gradually builds up, each particle moving a bit more than the one before, reaching a maximum at the centre, and then decreasing again. A plot of the amplitudes, shown in Figure 16-->, basically describes one-half of a sine wave from one end of the system to the other. The next mode is a full sine wave, then 3/2 of a sine wave, and so on to the highest frequency mode, which may be visualized as N/2 sine waves. If the vibrations were up and down rather than side to side, these modes would be identical to the fundamental and harmonic vibrations excited by plucking a guitar string.The atoms of a crystal are held in place by mutual forces of interaction that oppose any disturbance from equilibrium positions, just as the spring forces in the example above. For small displacements of the atoms, they behave mathematically just like spring forces—i.e., they obey Hooke's law, equation (10-->). Each atom is free to move in three dimensions rather than one, however; therefore each atom added to a crystal adds three normal modes. In a typical crystal at ordinary temperature, all these modes are always excited (excitation) by random thermal energy. The lower-frequency, longer-wavelength modes may also be excited mechanically. These are called sound waves.
). Each atom is free to move in three dimensions rather than one, however; therefore each atom added to a crystal adds three normal modes. In a typical crystal at ordinary temperature, all these modes are always excited (excitation) by random thermal energy. The lower-frequency, longer-wavelength modes may also be excited mechanically. These are called sound waves.Rigid bodies
statics
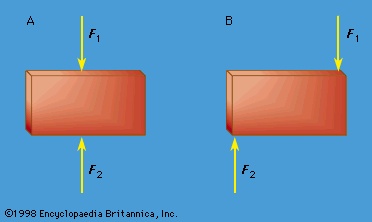 Statics is the study of bodies and structures that are in equilibrium. For a body to be in equilibrium, there must be no net force acting on it. In addition, there must be no net torque acting on it. Figure 17A--> shows a body in equilibrium under the action of equal and opposite forces. Figure 17B--> shows a body acted on by equal and opposite forces that produce a net torque, tending to start it rotating. It is therefore not in equilibrium.
Statics is the study of bodies and structures that are in equilibrium. For a body to be in equilibrium, there must be no net force acting on it. In addition, there must be no net torque acting on it. Figure 17A--> shows a body in equilibrium under the action of equal and opposite forces. Figure 17B--> shows a body acted on by equal and opposite forces that produce a net torque, tending to start it rotating. It is therefore not in equilibrium.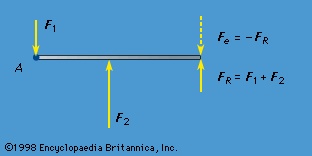 When a body has a net force and a net torque acting on it owing to a combination of forces, all the forces acting on the body may be replaced by a single (imaginary) force called the resultant, which acts at a single point on the body, producing the same net force and the same net torque. The body can be brought into equilibrium by applying to it a real force at the same point, equal and opposite to the resultant. This force is called the equilibrant. An example is shown in Figure 18-->.
When a body has a net force and a net torque acting on it owing to a combination of forces, all the forces acting on the body may be replaced by a single (imaginary) force called the resultant, which acts at a single point on the body, producing the same net force and the same net torque. The body can be brought into equilibrium by applying to it a real force at the same point, equal and opposite to the resultant. This force is called the equilibrant. An example is shown in Figure 18-->.The torque on a body due to a given force depends on the reference point chosen, since the torque τ by definition equals r × F, where r is a vector from some chosen reference point to the point of application of the force. Thus, for a body to be at equilibrium, not only must the net force on it be equal to zero but the net torque with respect to any point must also be zero. Fortunately, it is easily shown for a rigid body that, if the net force is zero and the net torque is zero with respect to any one point, then the net torque is also zero with respect to any other point in the frame of reference.
A body is formally regarded as rigid if the distance between any set of two points in it is always constant. In reality no body is perfectly rigid. When equal and opposite forces are applied to a body, it is always deformed slightly. The body's own tendency to restore the deformation (deformation and flow) has the effect of applying counterforces to whatever is applying the forces, thus obeying Newton's third law. Calling a body rigid means that the changes in the dimensions of the body are small enough to be neglected, even though the force produced by the deformation may not be neglected.
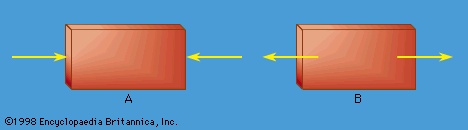 Equal and opposite forces acting on a rigid body may act so as to compress the body (Figure 19A-->) or to stretch it (Figure 19B-->). The bodies are then said to be under compression or under tension, respectively. Strings, chains, and cables are rigid under tension but may collapse under compression. On the other hand, certain building materials, such as brick and mortar, stone, or concrete, tend to be strong under compression but very weak under tension.
Equal and opposite forces acting on a rigid body may act so as to compress the body (Figure 19A-->) or to stretch it (Figure 19B-->). The bodies are then said to be under compression or under tension, respectively. Strings, chains, and cables are rigid under tension but may collapse under compression. On the other hand, certain building materials, such as brick and mortar, stone, or concrete, tend to be strong under compression but very weak under tension.The most important application of statics is to study the stability of structures, such as edifices and bridges. In these cases, gravity applies a force to each component of the structure as well as to any bodies the structure may need to support. The force of gravity acts on each bit of mass of which each component is made, but for each rigid component it may be thought of as acting at a single point, the centre of gravity (gravity, centre of), which is in these cases the same as the centre of mass.
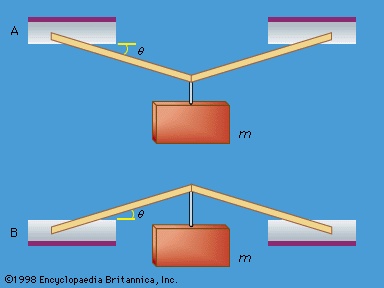 To give a simple but important example of the application of statics, consider the two situations shown in Figure 20-->. In each case, a mass m is supported by two symmetric members, each making an angle θ with respect to the horizontal. In Figure 20A--> the members are under tension; in Figure 20B--> they are under compression. In either case, the force acting along each of the members is shown to be
To give a simple but important example of the application of statics, consider the two situations shown in Figure 20-->. In each case, a mass m is supported by two symmetric members, each making an angle θ with respect to the horizontal. In Figure 20A--> the members are under tension; in Figure 20B--> they are under compression. In either case, the force acting along each of the members is shown to be
The force in either case thus becomes intolerably large if the angle θ is allowed to be very small. In other words, the mass cannot be hung from a perfectly horizontal member.
Special Comp-->The ancient Greeks built magnificent stone temples (temple); however, the horizontal stone slabs that constituted the roofs of the temples could not support even their own weight over more than a very small span. For this reason, one characteristic that identifies a Greek temple is the many closely spaced pillars (pillar) needed to hold up the flat roof. The problem posed by equation (71-->) was solved by the ancient Romans (ancient Rome), who incorporated into their architecture (arch) the arch, a structure that supports its weight by compression, corresponding to Figure 20B-->.
The ancient Greeks built magnificent stone temples (temple); however, the horizontal stone slabs that constituted the roofs of the temples could not support even their own weight over more than a very small span. For this reason, one characteristic that identifies a Greek temple is the many closely spaced pillars (pillar) needed to hold up the flat roof. The problem posed by equation (71-->) was solved by the ancient Romans (ancient Rome), who incorporated into their architecture (arch) the arch, a structure that supports its weight by compression, corresponding to Figure 20B-->.A suspension bridge illustrates the use of tension. The weight of the span and any traffic on it is supported by cables, which are placed under tension by the weight. Corresponding to Figure 20A-->, the cables are not stretched to be horizontal, but rather they are always hung so as to have substantial curvature.It should be mentioned in passing that equilibrium under static forces is not sufficient to guarantee the stability of a structure. It must also be stable against perturbations such as the additional forces that might be imposed, for example, by winds or by earthquakes. Analysis of the stability of structures under such perturbations is an important part of the job of an engineer or architect.
Rotation about a fixed axis
Consider a rigid body that is free to rotate about an axis fixed in space. Because of the body's inertia, it resists being set into rotational motion, and equally important, once rotating, it resists being brought to rest. Exactly how that inertial resistance depends on the mass and geometry of the body is discussed here.
Take the axis of rotation to be the z-axis. A vector in the x-y plane from the axis to a bit of mass fixed in the body makes an angle θ with respect to the x-axis. If the body is rotating, θ changes with time, and the body's angular frequency is

ω is also known as the angular velocity. If ω is changing in time, there is also an angular acceleration α, such that

Because linear momentum p is related to linear speed v by p = mv, where m is the mass, and because force F is related to acceleration a by F = ma, it is reasonable to assume that there exists a quantity I that expresses the rotational inertia of the rigid body in analogy to the way m expresses the inertial resistance to changes in linear motion. One would expect to find that the angular momentum is given by

and that the torque (twisting force) is given by

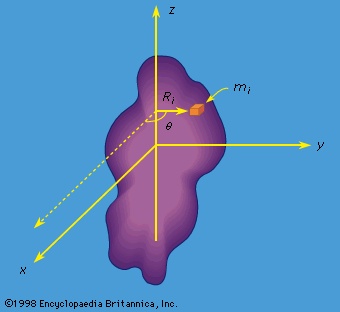 Special Comp-->Special Comp-->One can imagine dividing the rigid body into bits of mass labeled m1, m2, m3, and so on. Let the bit of mass at the tip of the vector be called mi, as indicated in Figure 21-->. If the length of the vector from the axis to this bit of mass is Ri, then mi's linear velocity vi equals ωRi (see equation 【31-->】), and its angular momentum Li equals miviRi (see equation 【44-->】), or miRi2ω. The angular momentum of the rigid body is found by summing all the contributions from all the bits of mass labeled i = 1, 2, 3 . . . :
Special Comp-->Special Comp-->One can imagine dividing the rigid body into bits of mass labeled m1, m2, m3, and so on. Let the bit of mass at the tip of the vector be called mi, as indicated in Figure 21-->. If the length of the vector from the axis to this bit of mass is Ri, then mi's linear velocity vi equals ωRi (see equation 【31-->】), and its angular momentum Li equals miviRi (see equation 【44-->】), or miRi2ω. The angular momentum of the rigid body is found by summing all the contributions from all the bits of mass labeled i = 1, 2, 3 . . . :
In a rigid body, the quantity in parentheses in equation (76-->) is always constant (each bit of mass mi always remains the same distance Ri from the axis). Thus if the motion is accelerated, then
) is always constant (each bit of mass mi always remains the same distance Ri from the axis). Thus if the motion is accelerated, then
Recalling that τ = dL/dt, one may write

(These equations may be written in scalar form, since L and τ are always directed along the axis of rotation in this discussion.) Comparing equations (76-->) and (78-->) with (74-->) and (75-->), one finds that
) and (78-->) with (74-->) and (75-->), one finds that
The quantity I is called the moment of inertia (inertia, moment of).
Special Comp-->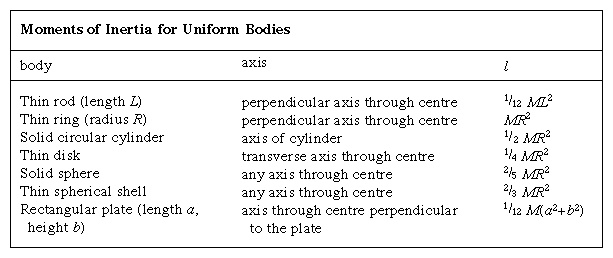 According to equation (79-->), the effect of a bit of mass on the moment of inertia depends on its distance from the axis. Because of the factor Ri2, mass far from the axis makes a bigger contribution than mass close to the axis. It is important to note that Ri is the distance from the axis, not from a point. Thus, if xi and yi are the x and y coordinates of the mass mi, then Ri2 = xi2 + yi2, regardless of the value of the z coordinate. The moments of inertia of some simple uniform bodies are given in the table-->.
According to equation (79-->), the effect of a bit of mass on the moment of inertia depends on its distance from the axis. Because of the factor Ri2, mass far from the axis makes a bigger contribution than mass close to the axis. It is important to note that Ri is the distance from the axis, not from a point. Thus, if xi and yi are the x and y coordinates of the mass mi, then Ri2 = xi2 + yi2, regardless of the value of the z coordinate. The moments of inertia of some simple uniform bodies are given in the table-->.
According to equation (79-->), the effect of a bit of mass on the moment of inertia depends on its distance from the axis. Because of the factor Ri2, mass far from the axis makes a bigger contribution than mass close to the axis. It is important to note that Ri is the distance from the axis, not from a point. Thus, if xi and yi are the x and y coordinates of the mass mi, then Ri2 = xi2 + yi2, regardless of the value of the z coordinate. The moments of inertia of some simple uniform bodies are given in the table-->.The moment of inertia of any body depends on the axis of rotation. Depending on the symmetry of the body, there may be as many as three different moments of inertia about mutually perpendicular axes passing through the centre of mass. If the axis does not pass through the centre of mass, the moment of inertia may be related to that about a parallel axis that does so. Let Ic be the moment of inertia about the parallel axis through the centre of mass, r the distance between the two axes, and M the total mass of the body. Then

In other words, the moment of inertia about an axis that does not pass through the centre of mass is equal to the moment of inertia for rotation about an axis through the centre of mass (Ic) plus a contribution that acts as if the mass were concentrated at the centre of mass, which then rotates about the axis of rotation.
The dynamics of rigid bodies rotating about fixed axes may be summarized in three equations. The angular momentum is L = Iω, the torque is τ = Iα, and the kinetic energy is K = 1/2Iω2.
Rotation about a moving axis
The general motion of a rigid body tumbling through space may be described as a combination of translation of the body's centre of mass and rotation about an axis through the centre of mass. The linear momentum of the body of mass M is given by

where vc is the velocity of the centre of mass. Any change in the momentum is governed by Newton's second law, which states that

where F is the net force acting on the body. The angular momentum of the body with respect to any reference point may be written as

where Lc is the angular momentum of rotation about an axis through the centre of mass, r is a vector from the reference point to the centre of mass, and r × p is therefore the angular momentum associated with motion of the centre of mass, acting as if all the body's mass were concentrated at that point. The quantity Lc in equation (83-->) is sometimes called the body's spin, and r × p is called the orbital angular momentum. Any change in the angular momentum of the body is given by the torque equation,
) is sometimes called the body's spin, and r × p is called the orbital angular momentum. Any change in the angular momentum of the body is given by the torque equation,
An example of a body that undergoes both translational and rotational motion is the Earth, which rotates about an axis through its centre once per day while executing an orbit around the Sun once per year. Because the Sun exerts no torque on the Earth with respect to its own centre, the orbital angular momentum of the Earth is constant in time. However, the Sun does exert a small torque on the Earth with respect to the planet's centre, owing to the fact that the Earth is not perfectly spherical. The result is a slow shifting of the Earth's axis of rotation, known as the precession of the equinoxes (equinoxes, precession of the) (see below).
The kinetic energy of a body that is both translating and rotating is given by

where I is the moment of inertia and ω is the angular velocity of rotation about the axis through the centre of mass.
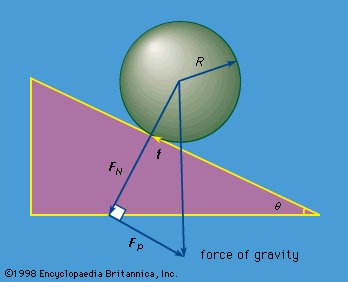 A common example of combined rotation and translation is rolling motion, as exhibited by a billiard ball rolling on a table, or a ball or cylinder rolling down an inclined plane. Consider the latter example, illustrated in Figure 22-->. Motion is impelled by the force of gravity, which may be resolved into two components, FN, which is normal to the plane, and Fp, which is parallel to it. In addition to gravity, friction plays an essential role. The force of friction, written as f, acts parallel to the plane, in opposition to the direction of motion, at the point of contact between the plane and the rolling body. If f is very small, the body will slide without rolling. If f is very large, it will prevent motion from occurring. The magnitude of f depends on the smoothness and composition of the body and the plane, and it is proportional to FN, the normal component of the force.Consider a case in which f is just large enough to cause the body (sphere or cylinder) to roll without slipping. The motion may be analyzed from the point of view of an axis passing through the point of contact between the rolling body and the plane. Remarkably, the point of contact may always be regarded to be instantaneously at rest. To understand why, suppose that the rolling body has radius R and angular velocity ω about its centre-of-mass axis. Then, with respect to its own axis, each point on the circular cross section in Figure 22--> moves with instantaneous tangential linear speed vc = Rω. In particular, the point of contact is moving backward with this speed relative to the centre of mass. But with respect to the inclined plane, the centre of mass is moving forward with exactly this same speed. The net effect of the two equal and opposite speeds is that the point of contact is always instantaneously at rest. Therefore, although friction acts at that point, no work is done by friction, so mechanical energy (potential plus kinetic) may be regarded as conserved.
A common example of combined rotation and translation is rolling motion, as exhibited by a billiard ball rolling on a table, or a ball or cylinder rolling down an inclined plane. Consider the latter example, illustrated in Figure 22-->. Motion is impelled by the force of gravity, which may be resolved into two components, FN, which is normal to the plane, and Fp, which is parallel to it. In addition to gravity, friction plays an essential role. The force of friction, written as f, acts parallel to the plane, in opposition to the direction of motion, at the point of contact between the plane and the rolling body. If f is very small, the body will slide without rolling. If f is very large, it will prevent motion from occurring. The magnitude of f depends on the smoothness and composition of the body and the plane, and it is proportional to FN, the normal component of the force.Consider a case in which f is just large enough to cause the body (sphere or cylinder) to roll without slipping. The motion may be analyzed from the point of view of an axis passing through the point of contact between the rolling body and the plane. Remarkably, the point of contact may always be regarded to be instantaneously at rest. To understand why, suppose that the rolling body has radius R and angular velocity ω about its centre-of-mass axis. Then, with respect to its own axis, each point on the circular cross section in Figure 22--> moves with instantaneous tangential linear speed vc = Rω. In particular, the point of contact is moving backward with this speed relative to the centre of mass. But with respect to the inclined plane, the centre of mass is moving forward with exactly this same speed. The net effect of the two equal and opposite speeds is that the point of contact is always instantaneously at rest. Therefore, although friction acts at that point, no work is done by friction, so mechanical energy (potential plus kinetic) may be regarded as conserved.With respect to the axis through the point of contact, the torque is equal to RFp, giving rise to an angular acceleration α given by Ipα = RFp, where Ip is the moment of inertia (inertia, moment of) about the point-of-contact axis and can be determined by applying equation (80-->) relating moments of inertia about parallel axes (Ip = I + MR2). Thus,
) relating moments of inertia about parallel axes (Ip = I + MR2). Thus,
From this result, the motion of the body is easily obtained using the fact that the velocity of the centre of mass is vc = Rω and hence the linear acceleration of the centre of mass is ac = Rα.
Notice that, although without friction no angular acceleration would occur, the force of friction does not affect the magnitude of α. Because friction does no work, this same result may be obtained by applying energy conservation. The situation also may be analyzed entirely from the point of view of the centre of mass. In that case, the torque is −fR, but f also provides a linear force on the body. The f may then be eliminated by using Newton's second law and the fact that the torque equals the moment of inertia times the angular acceleration, once again leading to the same result.
One more interesting fact is hidden in the form of equation (86-->). The parallel component of the force of gravity is given by
). The parallel component of the force of gravity is given by
where θ is the angle of inclination of the plane. The moment of inertia about the centre of mass of any body of mass M may be written

where k is a distance called the radius of gyration. Comparison to equation (79-->) shows that k is a measure of how far from the centre of mass the mass of the body is concentrated. Using equations (87-->) and (88-->) in equation (86-->), one finds that
) shows that k is a measure of how far from the centre of mass the mass of the body is concentrated. Using equations (87-->) and (88-->) in equation (86-->), one finds that
Thus, the angular acceleration of a body rolling down a plane does not depend on its total mass, although it does depend on its shape and distribution of mass. The same may be said of ac, the linear acceleration of the centre of mass. The acceleration of a rolling ball, like the acceleration of a freely falling object, is independent of its mass. This observation helps to explain why Galileo was able to discover many of the basic laws of dynamics in gravity by studying the behaviour of balls rolling down inclined planes.
Motion in a rotating frame
centrifugal force
According to the principle of Galilean relativity, if Newton's laws are true in any reference frame, they are also true in any other frame moving at constant velocity with respect to the first one. Conversely, they do not appear to be true in any frame accelerated (acceleration) with respect to the first. Instead, in an accelerated frame, objects appear to have forces acting on them that are not in fact present. These are called pseudoforces (inertial force), as described above. Since rotational motion is always accelerated motion, pseudoforces may always be observed in rotating frames of reference.
As one example, a frame of reference in which the Earth is at rest must rotate once per year about the Sun. In this reference frame, the gravitational force attracting the Earth toward the Sun appears to be balanced by an equal and opposite outward force that keeps the Earth in stationary equilibrium. This outward pseudoforce, discussed above, is the centrifugal force.
The rotation of the Earth about its own axis also causes pseudoforces for observers at rest on the Earth's surface. There is a centrifugal force, but it is much smaller than the force of gravity. Its effect is that, at the Equator, where it is largest, the gravitational (gravitation) acceleration g is about 0.5 percent smaller than at the poles, where there is no centrifugal force. This same centrifugal force is responsible for the fact that the Earth is slightly nonspherical, bulging just a bit at the Equator.
Pseudoforces can have real consequences. The oceanic tides (tide) on Earth, for example, are a consequence of centrifugal forces in the Earth-Moon and Earth-Sun systems. The Moon appears to be orbiting the Earth, but in reality both the Moon and the Earth orbit their common centre of mass. The centre of mass of the Earth-Moon system is located inside the Earth nearly three-fourths of the distance from the centre to the surface, or roughly 4,700 kilometres from the centre of the Earth. The Earth rotates about this point approximately once a month. The gravitational (gravity) attraction of the Moon and the centrifugal force of this rotation are exactly balanced at the centre of the Earth. At the surface of the Earth closest to the Moon, the Moon's gravity is stronger than the centrifugal force. The ocean's waters, which are free to move in response to this unbalanced force, tend to build up a small bulge at that point. On the surface of the Earth exactly opposite the Moon, the centrifugal force is stronger than the Moon's gravity, and a small bulge of water tends to build up there as well. The water is correspondingly depleted at the points 90° on either side of these. Each day the Earth rotates beneath these bulges and troughs, which remain stationary with respect to the Earth-Moon system. The result is two high tides and two low tides every day every place on Earth. The Sun has a similar effect, but of only about half the size; it increases or decreases the size of the tides depending on its relative alignment with the Earth and Moon.
Coriolis force
The Coriolis force is a pseudoforce that operates in all rotating frames. One way to envision it is to imagine a rotating platform (such as a merry-go-round or a phonograph turntable) with a perfectly smooth surface and a smooth block sliding inertially across it. The block, having no (real) forces acting on it, moves in a straight line at constant speed in inertial space. However, the platform rotates under it, so that to an observer on the platform, the block appears to follow a curved trajectory, bending in the opposite direction to the motion of the platform. Since the motion is curved, and hence accelerated, there appears, to the observer, to be a force operating. That pseudoforce is called the Coriolis force.
The Coriolis force also may be observed on the surface of the Earth. For example, many science museums have a pendulum, called a Foucault pendulum, suspended from a long cable with markers to show that its plane of motion rotates slowly. The rotation of the plane of motion is caused by the Coriolis force. The effect is most easily imagined by picturing the pendulum swinging directly above the North Pole. The plane of its motion remains stationary in inertial space, while the Earth rotates once a day beneath it.
At lower latitudes, the effect is a bit more subtle, but it is still present. Imagine that, somewhere in the Northern Hemisphere, a projectile is fired due south. As viewed from inertial space, the projectile initially has an eastward component of velocity as well as a southward component because the gun that fired it, which is stationary on the surface of the Earth, was moving eastward with the Earth's rotation at the instant it was fired. However, since it was fired to the south, it lands at a slightly lower latitude, closer to the Equator. As one moves south, toward the Equator, the tangential speed of the Earth's surface due to its rotation increases because the surface is farther from the axis of rotation. Thus, although the projectile has an eastward component of velocity (in inertial space), it lands at a place where the surface of the Earth has a larger eastward component of velocity. Thus, to the observer on Earth, the projectile seems to curve slightly to the west. That westward curve is attributed to the Coriolis force. If the projectile were fired to the north, it would seem to curve eastward.
The same analysis applied to a Foucault pendulum explains why its plane of motion tends to rotate in the clockwise direction anywhere in the Northern Hemisphere and in the counterclockwise direction in the Southern Hemisphere. Storms, known as cyclones (cyclone), tend to rotate in the opposite direction in each hemisphere, also due to the Coriolis force. Air moves in all directions toward a low-pressure centre. In the Northern Hemisphere, air moving up from the south is deflected eastward, while air moving down from the north is deflected westward. This effect tends to give cyclones a counterclockwise circulation in the Northern Hemisphere. In the Southern Hemisphere, cyclones tend to circulate in the clockwise direction.
Spinning tops and gyroscopes
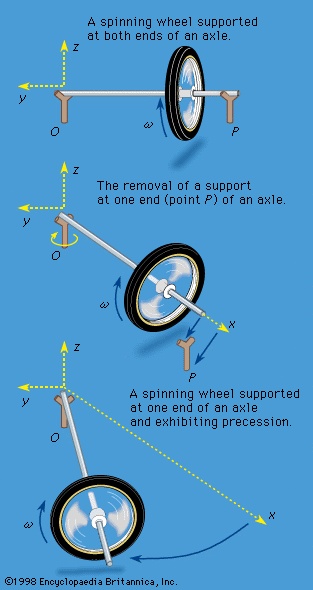 Figure 23--> (top) shows a wheel that is weighted in its rim to maximize its moment of inertia I and that is spinning with angular frequency ω on a horizontal axle supported at both ends. As shown, it has an angular momentum L along the x direction equal to Iω. Now suppose the support at point P is removed, leaving the axle supported only at one end (Figure 23-->, middle). Gravity, acting on the mass of the wheel as if it were concentrated at the centre of mass, applies a downward force on the wheel. The wheel, however, does not fall. Instead, the axle remains (nearly) horizontal but rotates in the counterclockwise direction as seen from above (Figure 23-->, bottom). This motion is called gyroscopic (gyroscope) precession.
Figure 23--> (top) shows a wheel that is weighted in its rim to maximize its moment of inertia I and that is spinning with angular frequency ω on a horizontal axle supported at both ends. As shown, it has an angular momentum L along the x direction equal to Iω. Now suppose the support at point P is removed, leaving the axle supported only at one end (Figure 23-->, middle). Gravity, acting on the mass of the wheel as if it were concentrated at the centre of mass, applies a downward force on the wheel. The wheel, however, does not fall. Instead, the axle remains (nearly) horizontal but rotates in the counterclockwise direction as seen from above (Figure 23-->, bottom). This motion is called gyroscopic (gyroscope) precession.Horizontal precession occurs in this case because the gravitational force results in a torque with respect to the point of suspension, such that τ = r × F and is directed, initially, in the positive y direction. The torque causes the angular momentum L to move toward that direction according to τ = dL/dt. Because τ is perpendicular to L, it does not change the magnitude of the angular momentum, only its direction. As precession proceeds, the torque remains horizontal, and the angular momentum vector, continually redirected by the torque, executes uniform circular motion in the horizontal plane at a frequency Ω, the frequency of precession.
In reality, the motion is a bit more complicated than uniform precession in the horizontal plane. When the support at P is released, the centre of mass of the wheel initially drops slightly below the horizontal plane. This drop reduces the gravitational potential energy of the system, releasing kinetic energy for the orbital motion of the centre of mass as it precesses. It also provides a small component of L in the negative z direction, which balances the angular momentum in the positive z direction that results from the orbital motion of the centre of mass. There can be no net angular momentum in the vertical direction because there is no component of torque in that direction.
One more complication: the initial drop of the centre of mass carries it too far for a stable plane of precession, and it tends to bounce back up after overshooting. This produces an up-and-down oscillation during precession, called nutation (“nodding”). In most cases, nutation is quickly damped by friction in the bearings, leaving uniform precession.
A spinning top undergoes all the motions described above. If it is initially set spinning with a vertical axis, there will be virtually no torque, and conservation of angular momentum will keep the axis vertical for a long time. Eventually, however, friction at the point of contact will require the centre of mass to lower itself, which can only happen if the axis tilts. The spinning will also slow down, making the tilting process easier. Once the top tilts, gravity produces a horizontal torque that leads to precession of the spin axis. The subsequent motion depends on whether the point of contact is fixed or free to slip on the horizontal plane. Vast tomes have been written on the motions of tops.
A gyroscope is a device that is designed to resist changes in the direction of its axis of spin. That purpose is generally accomplished by maximizing its moment of inertia about the spin axis and by spinning it at the maximum practical frequency. Each of these considerations has the effect of maximizing the magnitude of the angular momentum, thus requiring a larger torque to change its direction. It is quite generally true that the torque τ, the angular momentum L, and the precession frequency Ω (defined as a vector along the precession axis in the direction given by the right-hand rule) are related by

Special Comp-->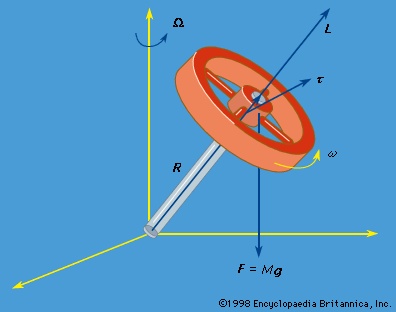 Equation (90-->), illustrated in Figure 24-->, is called the gyroscope equation.
Equation (90-->), illustrated in Figure 24-->, is called the gyroscope equation.
Equation (90-->), illustrated in Figure 24-->, is called the gyroscope equation.Gyroscopes are used for a variety of purposes, including navigation. Use of gyroscopes for this purpose is called inertial guidance (inertial guidance system). The gyroscope is suspended as nearly as possible at its centre of mass, so that gravity does not apply a torque that causes it to precess. The gyroscope tends therefore to point in a constant direction in space, allowing the orientation of the vehicle to be accurately maintained.
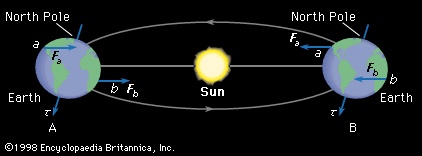 One further application of the gyroscope principle may be seen in the precession of the equinoxes (equinoxes, precession of the). The Earth is a kind of gyroscope, spinning on its axis once each day. The Sun would apply no torque to the Earth if the Earth were perfectly spherical, but it is not. The Earth bulges slightly at the Equator. As indicated in Figure 25-->, the effect of the Sun's gravity on the near bulge (larger than it is on the far bulge) results in a net torque about the centre of the Earth. When the Earth is on the other side of the Sun, the net torque remains in the same direction. The torque is small but persistent. It causes the axis of the Earth to precess, about one revolution every 25,800 years.
One further application of the gyroscope principle may be seen in the precession of the equinoxes (equinoxes, precession of the). The Earth is a kind of gyroscope, spinning on its axis once each day. The Sun would apply no torque to the Earth if the Earth were perfectly spherical, but it is not. The Earth bulges slightly at the Equator. As indicated in Figure 25-->, the effect of the Sun's gravity on the near bulge (larger than it is on the far bulge) results in a net torque about the centre of the Earth. When the Earth is on the other side of the Sun, the net torque remains in the same direction. The torque is small but persistent. It causes the axis of the Earth to precess, about one revolution every 25,800 years.As seen from the Earth, the Sun passes through the plane of the Equator twice each year. These points are called the equinoxes, and on the days of the equinoxes the hours of daylight and night are equal. From antiquity it has been known that the point in the sky where the Sun intersects the plane of the Equator is not the same each year but rather drifts very slowly to the west. This ancient observation, first explained by Newton, is due to the precession of the Earth's axis. It is called the precession of the equinoxes.
Analytic approaches
Classical mechanics can, in essence, be reduced to Newton's laws (Newton's laws of motion), starting with the second law, in the form

If the net force acting on a particle is F, knowledge of F permits the momentum p to be found; and knowledge of p permits the position r to be found, by solving the equation

These solutions give the components of p—that is, px, py, and pz—and the components of r—x, y, and z—each as a function of time. To complete the solution, the value of each quantity—px, py, pz, x, y, and z—must be known at some definite time, say, t = 0. If there is more than one particle, an equation in the form of equation (91-->) must be written for each particle, and the solution will involve finding the six variables x, y, z, px, py, and pz, for each particle as a function of time, each once again subject to some initial condition. The equations may not be independent, however. For example, if the particles interact with one another, the forces will be related by Newton's third law. In this case (and others), the forces may also depend on time.
) must be written for each particle, and the solution will involve finding the six variables x, y, z, px, py, and pz, for each particle as a function of time, each once again subject to some initial condition. The equations may not be independent, however. For example, if the particles interact with one another, the forces will be related by Newton's third law. In this case (and others), the forces may also depend on time.If the problem involves more than a very few particles, this method of solution quickly becomes intractable. Furthermore, in many cases it is not useful to express the problem purely in terms of particles and forces. Consider, for example, the problem of a sphere or cylinder rolling without slipping on a plane surface. Rolling without slipping is produced by friction due to forces acting between atoms in the rolling body and atoms in the plane, but the interactions are very complex; they probably are not fully understood even today, and one would like to be able to formulate and solve the problem without introducing them or needing to understand them. For all these reasons, methods that go beyond solving equations (91-->) and (92-->) have had to be introduced into classical mechanics.
) and (92-->) have had to be introduced into classical mechanics.The methods that have been introduced do not involve new physics. In fact, they are deduced directly from Newton's laws. They do, however, involve new concepts, new language to describe those concepts, and the adoption of powerful mathematical techniques. Some of those methods are briefly surveyed here.
Configuration space
The position of a single particle is specified by giving its three coordinates, x, y, and z. To specify the positions of two particles, six coordinates are needed, x1, y1, z1, x2, y2, z2. If there are N particles, 3N coordinates will be needed. Imagine a system of 3N mutually orthogonal coordinates in a 3N-dimensional space (a space of more than three dimensions is a purely mathematical construction, sometimes known as a hyperspace). To specify the exact position of one single point in this space, 3N coordinates are needed. However, one single point can represent the entire configuration of all N particles in the problem. Furthermore, the path of that single point as a function of time is the complete solution of the problem. This 3N-dimensional space is called configuration space.
Configuration space is particularly useful for describing what is known as constraints on a problem. Constraints are generally ways of describing the effects of forces that are best not explicitly introduced into the problem. For example, consider the simple case of a falling body (free-fall) near the surface of the Earth. The equations of motion—equations (4-->), (5-->), and (6-->)—are valid only until the body hits the ground. Physically, this restriction is due to forces between atoms in the falling body and atoms in the ground, but, as a practical matter, it is preferable to say that the solutions are valid only for z \\> 0 (where z = 0 is ground level). This constraint, in the form of an inequality, is very difficult to incorporate directly into the equations of the problem. In the language of configuration space, however, one merely needs to specify that the problem is being solved only in the region of configuration space for which z \\> 0.
), (5-->), and (6-->)—are valid only until the body hits the ground. Physically, this restriction is due to forces between atoms in the falling body and atoms in the ground, but, as a practical matter, it is preferable to say that the solutions are valid only for z \\> 0 (where z = 0 is ground level). This constraint, in the form of an inequality, is very difficult to incorporate directly into the equations of the problem. In the language of configuration space, however, one merely needs to specify that the problem is being solved only in the region of configuration space for which z \\> 0.Notice that the constraint mentioned above, rolling without sliding on a plane, cannot easily be described in configuration space, since it is basically a condition on relative velocities of rotation and translation; but another constraint, that the body is restricted to motion along the plane, is easily described in configuration space.
Another type of constraint specifies that a body is rigid. Then, even though the body is composed of a very large number of atoms, it is not necessary to find separately the x, y, and z coordinate of each atom because these are related to those of the other atoms by the condition of rigidity. A careful analysis yields that, rather than needing 3N coordinates (where N may be, for example, 1024 atoms), only 6 are needed: 3 to specify the position of the centre of mass and 3 to give the orientation of the body. Thus, in this case, the constraint has reduced the number of independent coordinates from 3N to 6. Rather than restricting the behaviour of the system to a portion of the original 3N-dimensional configuration space, it is possible to describe the system in a much simpler 6-dimensional configuration space. It should be noted, however, that the six coordinates are not necessarily all distances. In fact, the most convenient coordinates are three distances (the x, y, and z coordinates of the centre of mass of the body) and three angles, which specify the orientation of a set of axes fixed in the body relative to a set of axes fixed in space. This is an example of the use of constraints to reduce the number of dynamic variables in a problem (the x, y, and z coordinates of each particle) to a smaller number of generalized dynamic variables, which need not even have the same dimensions as the original ones.
The principle of virtual work
A special class of problems in mechanics involves systems in equilibrium. The problem is to find the configuration of the system, subject to whatever constraints there may be, when all forces are balanced. The body or system will be at rest (in the inertial rest frame of its centre of mass), meaning that it occupies one point in configuration space for all time. The problem is to find that point. One criterion for finding that point, which makes use of the calculus of variations, is called the principle of virtual work.
According to the principle of virtual work, any infinitesimal virtual displacement in configuration space, consistent with the constraints, requires no work. A virtual displacement means an instantaneous change in coordinates (a real displacement would require finite time during which particles might move and forces might change). To express the principle, label the generalized coordinates r1, r2, . . . , ri, . . . . Then if Fi is the net component of generalized force acting along the coordinate ri,

Here, Fi dri is the work done when the generalized coordinate is changed by the infinitesimal amount dri. If ri is a real coordinate (say, the x coordinate of a particle), then Fi is a real force. If ri is a generalized coordinate (say, an angular displacement of a rigid body), then Fi is the generalized force such that Fi dri is the work done (for an angular displacement, Fi is a component of torque).
Take two simple examples to illustrate the principle. First consider two particles that are restricted to motion in the x direction and are constrained by a taut string connecting them. If their x coordinates are called x1 and x2, then F1dx1 + F2dx2 = 0 according to the principle of virtual work. But the taut string requires that the particles be displaced the same amount, so that dx1 = dx2, with the result that F1 + F2 = 0. The particles might be in equilibrium, for example, under equal and opposite forces, but F1 and F2 do not need individually to be zero. This is generally true of the Fi in equation (93-->). As a second example, consider a rigid body in space. Here, the constraint of rigidity has already been expressed by reducing the coordinate space to that of six generalized coordinates. These six coordinates (x, y, z, and three angles) can change quite independently of one another. In other words, in equation (93-->), the six dri are arbitrary. Thus, the only way equation (93-->) can be satisfied is if all six Fi are zero. This means that the rigid body can have no net component of force and no net component of torque acting on it. Of course, this same conclusion was reached earlier (see Statics (mechanics)) by less abstract arguments.
). As a second example, consider a rigid body in space. Here, the constraint of rigidity has already been expressed by reducing the coordinate space to that of six generalized coordinates. These six coordinates (x, y, z, and three angles) can change quite independently of one another. In other words, in equation (93-->), the six dri are arbitrary. Thus, the only way equation (93-->) can be satisfied is if all six Fi are zero. This means that the rigid body can have no net component of force and no net component of torque acting on it. Of course, this same conclusion was reached earlier (see Statics (mechanics)) by less abstract arguments.Lagrange's and Hamilton's equations
Elegant and powerful methods have also been devised for solving dynamic problems with constraints. One of the best known is called Lagrange's equations. The Lagrangian (Lagrangian function) L is defined as L = T − V, where T is the kinetic energy and V the potential energy of the system in question. Generally speaking, the potential energy of a system depends on the coordinates of all its particles; this may be written as V = V(x1, y1, z1, x2, y2, z2, . . . ). The kinetic energy generally depends on the velocities, which, using the notation vx = dx/dt = ẋ, may be written T = T(ẋ1, ẏ1, ż1, ẋ2, ẏ2, ż2, . . . ). Thus, a dynamic problem has six dynamic variables for each particle—that is, x, y, z and ẋ, ẏ, ż—and the Lagrangian depends on all 6N variables if there are N particles.
In many problems, however, the constraints of the problem permit equations to be written relating at least some of these variables. In these cases, the 6N related dynamic variables may be reduced to a smaller number of independent generalized coordinates (written symbolically as q1, q2, . . . qi, . . . ) and generalized velocities (written as 1, 2, . . . i, . . . ), just as, for the rigid body, 3N coordinates were reduced to six independent generalized coordinates (each of which has an associated velocity). The Lagrangian, then, may be expressed as a function of all the qi and i. It is possible, starting from Newton's laws only, to derive Lagrange's equations

where the notation ∂L/∂qi means differentiate L with respect to qi only, holding all other variables constant. There is one equation of the form (94-->) for each of the generalized coordinates qi (e.g., six equations for a rigid body), and their solutions yield the complete dynamics of the system. The use of generalized coordinates allows many coupled equations of the form (91-->) to be reduced to fewer, independent equations of the form (94-->).
) for each of the generalized coordinates qi (e.g., six equations for a rigid body), and their solutions yield the complete dynamics of the system. The use of generalized coordinates allows many coupled equations of the form (91-->) to be reduced to fewer, independent equations of the form (94-->).There is an even more powerful method called Hamilton's equations. It begins by defining a generalized momentum pi, which is related to the Lagrangian and the generalized velocity i by pi = ∂L/∂i. A new function, the Hamiltonian (Hamiltonian function), is then defined by H = ∑i i pi − L. From this point it is not difficult to derive

and

These are called Hamilton's equations. There are two of them for each generalized coordinate. They may be used in place of Lagrange's equations, with the advantage that only first derivatives—not second derivatives—are involved.
The Hamiltonian method is particularly important because of its utility in formulating quantum mechanics. However, it is also significant in classical mechanics. If the constraints in the problem do not depend explicitly on time, then it may be shown that H = T + V, where T is the kinetic energy and V is the potential energy of the system—i.e., the Hamiltonian is equal to the total energy of the system. Furthermore, if the problem is isotropic (H does not depend on direction in space) and homogeneous (H does not change with uniform translation in space), then Hamilton's equations immediately yield the laws of conservation of angular momentum and linear momentum, respectively.
Additional Reading
The history of classical mechanics is chronicled in I. Bernard Cohen, The Newtonian Revolution (1980); and E.J. Dijksterhuis, The Mechanization of the World Picture (1961; originally published in Dutch, 1950). All introductory physics textbooks contain a portion on classical mechanics; recent examples include Hans C. Ohanian, Physics, 2nd ed. (1989); and Robert Resnick, David Halliday, and Kenneth S. Krane, Physics, 4th ed. (1992). The principal reference for classical mechanics is S. Frautschi et al., The Mechanical Universe: Mechanics and Heat, advanced ed. (1986). Other texts include, at an introductory level, A.P. French, Newtonian Mechanics (1971); and at a more advanced, graduate-school level, Herbert Goldstein, Classical Mechanics, 2nd ed. (1980), a standard text that contains a lengthy, detailed bibliography of more specialized books dealing with specific aspects of the subject.
- John Masefield
- John Maurice Clark
- John Maurice Of Nassau
- John Mauropous
- John Maxwell, 4th Baron Herries
- John Maxwell Herries, 4th Baron
- John Mayall
- John Mayer
- John Maynard Keynes
- John Mayow
- John M. Bozeman
- John McCain
- John McCloskey
- John McCormack
- John McEnroe
- John McGahern
- John McGraw
- John McKinley
- John McLaughlin
- John McLean
- John McLeod Campbell
- John M. Cooper
- John McPhee
- John Mellencamp
- John Mercer Langston