惯性平台(卷名:航空 航天)
inertial platform
利用陀螺仪在惯性空间使台体保持方位不变的装置,又称陀螺稳定平台。它是惯性导航系统中的重要部件。用它可在飞行器上建立一个不受飞行器运动影响的参考坐标系,据以测量飞行器的姿态角和加速度。由惯性平台组成的导航系统称为平台式惯性导航系统。
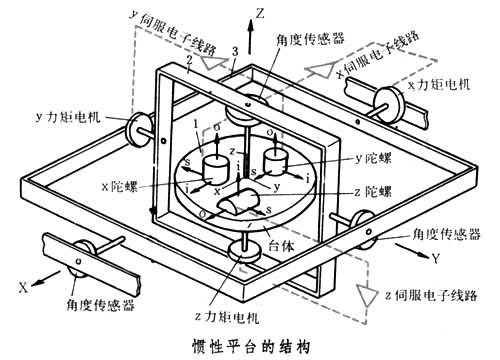
组成和原理 惯性平台由台体 1、三个单轴陀螺仪、内框架 2、外框架 3、力矩电机、角度传感器和伺服电子线路等组成。台体通过内框架和外框架支承在基座上,基座与飞行器固连。如果沿Y轴存在干扰力矩,就会使内框架和台体绕Y轴转动。台体上的y单轴陀螺仪感受转动角速度,单轴陀螺仪处于积分陀螺的工作状态,输出与台体转角成正比的信号(见速率陀螺仪),通过y伺服电子线路加给y力矩电机。力矩电机输出与干扰力矩相反方向的力矩,使台体向原来的方向转动。当y力矩电机输出的力矩与干扰力矩相互抵消时,台体不再转动,在惯性空间的方位保持不变。当X、Z轴存在干扰力矩时道理相同。飞行器转动时,台体在惯性空间的方位保持不变,装在X、Y、Z 轴上的角度传感器即输出飞行器相对于惯性坐标系的转角。惯性平台也可用两个双轴陀螺仪(双自由度陀螺仪)等构成。
应用 惯性平台主要用于惯性导航系统。惯性导航系统中的加速度计装在惯性平台的台体上,这个台体隔离了飞行器角运动对测量加速度的影响。但还需要建立惯性平台的地理参考坐标系,即平台应保持水平(称为水平对准)和对准北向(称为方位对准)。利用台体上的加速度计和惯性平台组成的回路可使平台跟踪地垂线。当台体有倾角时,加速度计测出重力的分量并输出信号,经电子线路(积分器)和单轴积分陀螺加给力矩电机,使台体反向转动,恢复水平。飞行器的加速度对台体水平位置的影响可利用舒拉摆的原理加以排除。
惯性平台一般采用引入式对准和自主式对准两种方式对准北向(方位对准)。引入式对准是将外部基准(如罗盘的北向)引入平台并与台体的方位比较,其偏差信号经放大后输到方位陀螺力矩器,驱使台体绕方位轴转动,直到偏差信号为零,于是台体的方位与外部基准方位一致。自主式对准是利用陀螺仪感受地球角速度的效应,驱使平台自主地找到地球北向。
当飞行器的姿态角变化很大时,外框架和内框架会发生重合现象,称为框架自锁。这时回路不能正常工作,平台不能继续用作参考坐标系。增加一个随动框架可以解决自锁问题。另一种方法是将台体做成球形并悬浮在液体中而避免使用框架。
参考书目
陆元九编著:《陀螺及惯性导航原理》,科学出版社,北京,1964。