捷联式惯性导航(卷名:航空 航天)
strap-down inertial navigation
惯性测量元件(陀螺仪和加速度计)直接装在飞行器上,用计算机把测量信号变换为导航参数的一种导航技术。现代电子计算机技术的迅速发展为捷联式惯性导航系统创造了条件。自50年代末人们开始研究这种新型导航系统以来,它已成功地用于导引航天器再入大气层的飞行。捷联式惯性导航系统在美国“阿波罗”号飞船上作为备用系统曾发挥了作用。70年代以来,捷联式惯性导航系统又在导弹和飞机上获得应用。
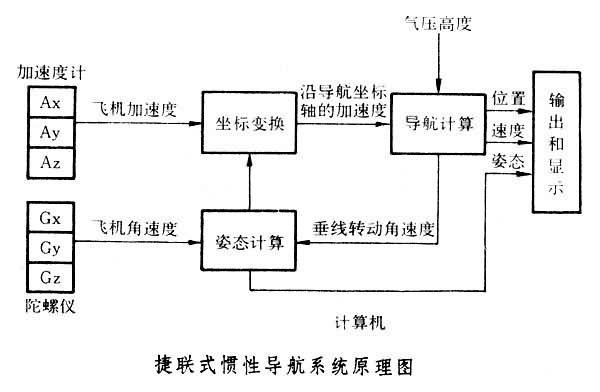
捷联式惯性导航系统 在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏,是一种自主式导航系统。捷联式惯性导航系统与平台式惯性导航系统比较有两个主要的区别:①省去了惯性平台,陀螺仪和加速度计直接安装在飞行器上,使系统体积小、重量轻、成本低、维护方便。但陀螺仪和加速度计直接承受飞行器的振动、冲击和角运动,因而会产生附加的动态误差。这对陀螺仪和加速度计就有更高的要求。②需要用计算机对加速度计测得的飞行器加速度信号进行坐标变换,再进行导航计算得出需要的导航参数(航向、地速、航行距离和地理位置等)。下图示出捷联式惯性导航系统原理框图。这种系统需要进行坐标变换,而且必须进行实时计算,因而要求计算机具有很高的运算速度和较大的容量。
捷联式惯性导航系统根据所用陀螺仪的不同分为两类:一类采用速率陀螺仪,如单自由度挠性陀螺仪、激光陀螺仪(见陀螺仪)等,它们测得的是飞行器的角速度,这种系统称为速率型捷联式惯性导航系统;另一类采用双自由度陀螺仪,如静电陀螺仪,它测得的是飞行器的角位移,这种系统称为位置型捷联式惯性导航系统。通常所说的捷联式惯性导航系统是指速率型捷联式惯性导航系统。
矩阵变换和姿态、航向信息的计算 惯性导航的实质是测出飞行器相对导航坐标系(如地理坐标系)的加速度,经过两次积分得到飞过的距离,从而确定飞行器所在的位置。在捷联式惯性导航系统中测得的是沿飞行器机体轴向的加速度,因而需要利用数学方法把机体坐标系轴向的加速度信号换算成地理坐标系轴向的加速度信号。常用的坐标换算方法有欧拉角法、方向余弦法和四元素法三种。欧拉角法用动坐标系相对参考坐标系依次绕3个不同坐标轴转动的3个角度来描述它们之间的方位关系。这 3个角度称为欧拉角。方向余弦法用动坐标系3个坐标轴和参考坐标系3个轴之间的方向余弦来描述这两个坐标系相对的方位关系。四元素法用动坐标系相对参考坐标系转动的等效转轴上的单位矢量和转动角度构成四元素来描述动坐标系相对参考坐标系的方位关系。用这三种方法都可以算出两种坐标系之间的变换矩阵,进行坐标变换并提取姿态和航向信息。
初始对准 即给定导航参数的初始值,计算初始时刻的变换矩阵。捷联式加速度计测量的重力加速度信号和捷联式陀螺仪测得的地球自转角速度信号经计算机计算即可得出初始变换矩阵。
余度配置 采用多余部件来提高系统可靠性的方法称为余度技术。在捷联式惯性导航系统中,由于惯性元件直接安装在飞行器上而有利于采用余度配置。测量飞行器沿坐标系各轴的加速度和角速度,一般只须分别沿3个坐标轴配置 3个加速度计和3个单自由度陀螺仪。但只要一个元件发生故障,系统便不能正常工作。如果在飞行器上适当配置6个加速度计和6个单自由度陀螺仪,使它们的几何位置构成斜置布局,再用计算机适当处理各元件的输出信息,那么即使有2个加速度计和2个单轴陀螺仪损坏,系统也仍能正常工作,这就使得系统的可靠性大大提高。