空中交通管制系统(卷名:电子学与计算机)
air traffic control system
管理多架飞机起降和航行,以保障飞行秩序和安全的系统。空中交通管制系统的主要任务是:①防止飞机在空中相撞;②防止飞机在跑道滑行时与障碍物或其他行驶中的飞机、车辆相撞;③保证飞机按计划有秩序地飞行;④提高飞行空间的利用率。为完成这些任务,必须制定一套规则,即确定出若干空中航路,使飞机按一定顺序从各自机场起飞,进入航路并保持飞机间的一定距离间隔,到达终点前脱离航路并按一定顺序降落。接受管制的飞机依靠目视、无线电通信和导航手段执行管制规则。
发展简况 第一代空中交通管制系统是在第二次世界大战以前形成的,主要由沿航路布置的一些低频导航站组成。飞行员通过导航掌握航向,靠保持沿航路飞行的时间或飞越固定点的时间间隔来避免相撞。这种系统是人工的,地面无法监视空中飞行。第二代空中交通管制系统是在第二次世界大战期间及以后,随着雷达、伏尔导航系统、地美依导航系统和仪表着陆系统的出现而发展起来的。它采用对飞机询问识别的二次监视雷达,因而能有效地监视飞行,使管制作用大为提高。第三代空中交通管制系统出现于60年代,是一种雷达、通信和计算机相结合的半自动系统。
管制任务划分 现代空中交通管制涉及飞行的全过程,即从驶出停机坪开始,经起飞爬升,进入航路,通过报告点到目的地机场降落为止,飞机始终处于监视和管制之下。在这个过程中,管制分为三级:塔台管制、进近管制和区域管制。
① 塔台管制:塔台设在机场,主要是维持机场的飞行秩序、指挥滑行和起降、防止碰撞。各国的管制范围不一,视空域、飞行量和管制能力而定,在中国通常为100公里左右。
② 进近管制:对处于塔台管制范围和区域管制范围之间的进场或离场飞机实施管制。其范围有时较大,可达180公里以上,可以包括几个机场。
③ 区域管制:也称航路管制,由区域管制中心执行,主要是使航路上的飞机之间保持安全间隔。它能对飞机实施竖向、纵向或横向调配,以避免碰撞,确保安全。
管制系统主要有两类:执行塔台和进近管制的终端区管制系统,执行区域和高空管制的区域管制系统或区域管制中心。
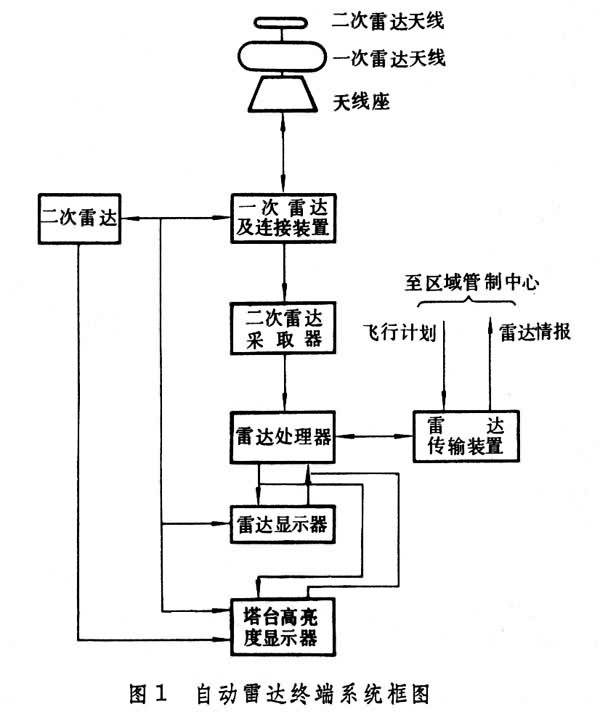
① 终端区管制系统:通常包括由一次雷达、二次雷达构成的数据获取分系统、由电子计算机构成的数据处理分系统、由雷达综合显示器和高亮度显示器构成的显示分系统、以及由图像数据传输、内部通信、对空指挥通信构成的通信分系统等,执行塔台和进近两级管制任务。这个系统的主要功能是:对装有应答机的飞机进行自动跟踪;进行代码呼号相关;显示飞行航迹和有关数据;用人工输入或直接接收邻近管制中心的飞行计划;对输入的计划进行简单处理;进行低高度报警;与邻近管制中心交换飞行数据。美国的自动雷达终端系统ARTS-Ⅱ和ARTS-Ⅲ是典型的终端区管制系统。前者用于中小型机场,后者用于大型机场(图1)。
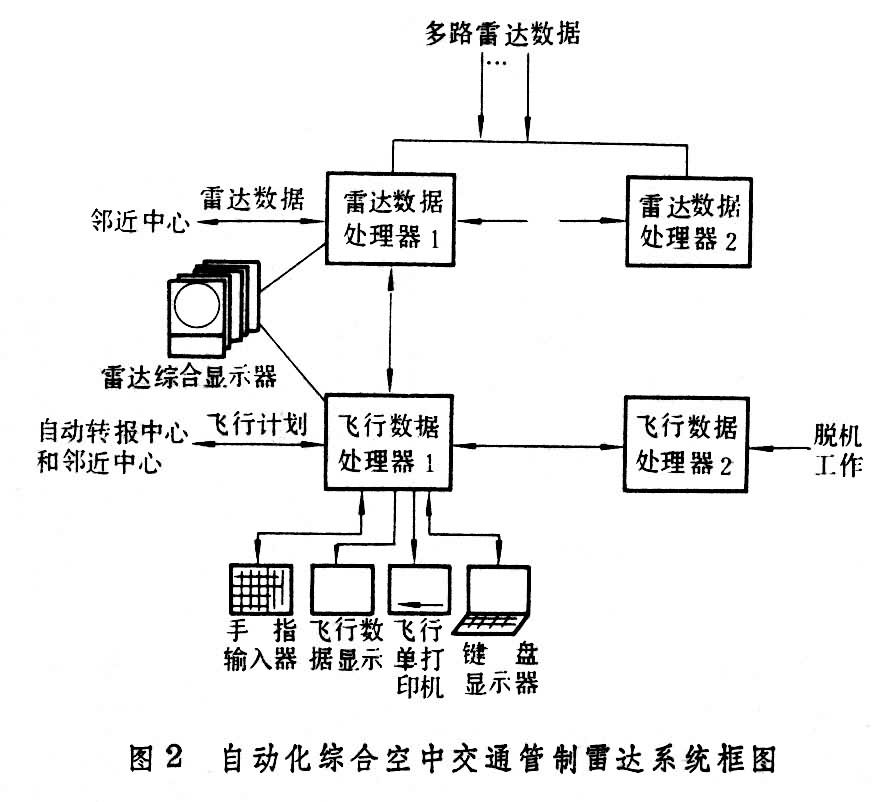
② 区域管制系统:执行区域管制任务,有时也担负高空管制。它通常包括:由多部远程一次雷达与二次雷达以及由雷达与飞行计划数据传输设备构成的数据获取和传输分系统;由多部计算机构成的飞行计划和雷达数据处理分系统;由雷达综合显示器、飞行数据显示器和飞行单打印机等组成的显示和数据终端分系统;由内部通信、对外直通电话和对空指挥通信组成的通信分系统。区域管制系统的主要功能是:自动接收、处理多部雷达数据和飞行计划信息;跟踪监视飞机、预测碰撞并提供可选择的调配方案;实行区域管制和区域间的自动管制交接;显示各种有关飞行的数据(包括气象数据);自动打印飞行进程单和同相邻中心交换飞行数据。美国的国家空域管制系统 (NAS)和法国的自动化综合空中交通雷达管制系统(图2)都属于典型的区域管制系统。
空域结构与管制过程 空域是指地球上空可供飞行的广大空间,实际能利用的只是其中极小的一部分。在人口众多的城市之间,大都划有空中航路。最为繁忙的地区是终端区和机场。飞机是从停机点转到二维平面上起飞,又转入三维空间飞行;相反的过程就是从飞行转到停机。终端区和机场是飞行活动的集散处。
空中航路和航路网都是以国际标准导航系统,如伏尔导航系统、地美依导航系统、伏尔-地美依导航系统或伏尔塔克导航系统等作为地面基准规划而成的。航路分为低、高两层,低层从海拔200米起至5500米,适应低性能飞机飞行的需要;高层从 5500米至14000米,适应高性能飞机按仪表飞行规则飞行。在 5500米至30000米间飞行的飞机,必须装设合格的通信、导航、雷达信标应答器等设备。在 14000米以上,可依地面导航台直飞,而不限于规定的航路。
终端区是以机场为中心、以约10公里的半径范围向上延伸成圆形空域。海洋空域是国际空域,范围在海岸线200公里以外,从海平面以上600~1500米起向上延伸。大陆上空还可根据需要划分为禁飞空域、限制空域和飞行训练空域等。
保持空中飞行间隔是保障飞行安全的重要方法。由于飞机飞行速度差别很大,一般规定,在无雷达监视的情况下纵向间隔应在20~40公里之内。地面沿途如用雷达监视,纵向间隔可减到5~10公里,垂直间隔须保持300米。横向间隔指对面交错或平行飞行,在5500米高度以下须保持15公里,在雷达监视时可减到6公里。在海洋上空,纵向间隔与横向间隔可放宽到170~220公里。
在规定航道上飞行,除无线电导航设备保障飞行准确外,控制和监视飞行间隔是空中交通管制系统的主要职责。为此,空中交通管制系统大都采用控制放飞时间,以及飞机在规定地点和时间向地面报告位置等方法。如采用雷达监视,可连续监控间隔。飞机自备的防撞装置尚处于研究之中。
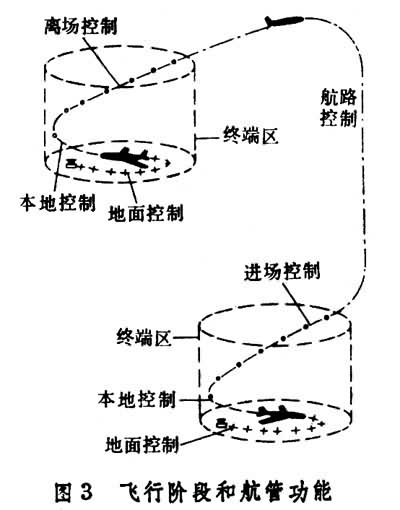
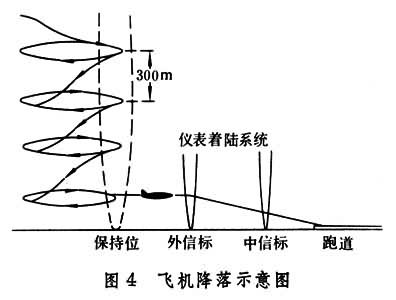
空中交通管制主要分为起飞、航途和到达终端区着陆三个阶段(图3)。在到达终端区着陆阶段常遇到堵塞情况。为此,到达的飞机须在规定空域分层排队降落。仪表着陆系统或其他助降设备是完成这种作用的关键设备(图4)。现代微波着陆系统已经研制成功。多架飞机到达终端着陆,一般是按照先到先降的原则。当飞行业务达到饱和时,航行管制系统可实行流量控制。
空中交通管制电子系统 空中交通管制电子系统包括通信、导航、监视、目标获取和处理,以及显示等设备。通信是最根本的航行管制手段。传统方式是空中与地面之间用无线电话,地面之间用有线电话或无线电话。数字通信适应现代繁忙的飞行业务需要。雷达数据遥传也属于通信范围。
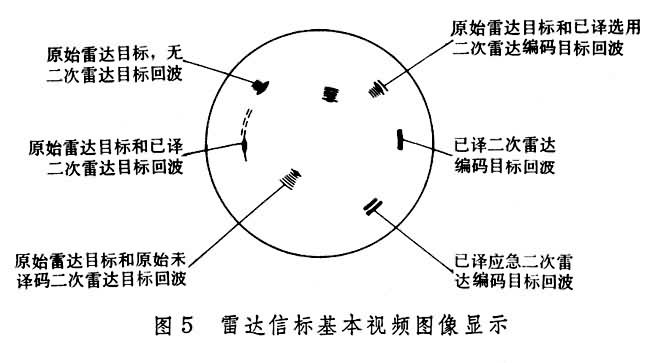
雷达是空中交通管制系统中非常重要的手段。雷达回波包含有丰富的信息,在航路上,一般使用航路监视雷达,覆盖范围可达370公里(半径),监视高度可达18公里,但低空覆盖范围较差。航路雷达使用L频段或S频段。在终端区和机场上一般使用 S频段雷达,其作用距离只要求 111公里。终端区雷达也可用来指引飞机进入跑道延长线上空。二次雷达即雷达信标,从地面向飞机发送询问信号,飞机向地面应答(图5)。询问与应答信号均采用编码方式,应答中含有飞机识别信息和高度数据。雷达信标可以单独工作,但常与航路雷达和机场雷达配合工作。
雷达捕获目标所得数据,经过处理才成为有用的信息。因此,电子计算机是航管系统中的重要组成部分。
雷达数据显示利用平面位置显示器(见雷达显示器),飞机回波呈现为小弧形,而动目标显示电路所不能消除的气象和地面回波则以大面积出现。二次雷达在图像译码器中只显示回答码正确的目标。
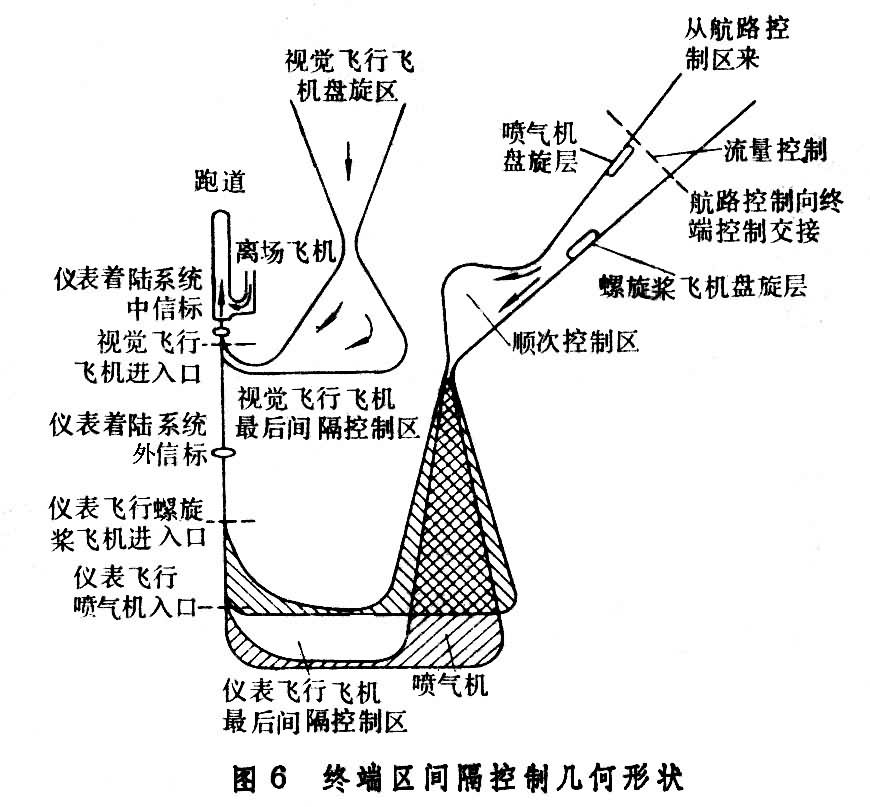
容量 影响飞行业务容量的因素有气象条件、飞行位置的准确度、飞行密度、飞行间隔、飞行性能、飞行技术、空中交通管制人员的工作能力和空中交通管制设施等。一个航管区内交通量受空域和数据传输(通信)速度的限制。航路上的飞行量决定于机场的接受能力。图6为繁忙终端管区的复杂状况。