模型参考适应控制系统(卷名:自动控制与系统工程)
model reference adaptive control systems
包含有理想系统模型并能以模型的工作状态为标准自行调整参数的适应控制系统,简称模型参考系统。这种适应控制系统已有较成熟的分析综合理论和方法。模型参考适应控制系统最初是为设计飞机自动驾驶仪而提出的,初期阶段由于技术上的困难而未能得到广泛应用。随着微型计算机技术的发展,这种系统的实现已较容易。模型参考适应控制技术已在飞机自动驾驶仪、舰船自动驾驶系统、光电跟踪望远镜随动系统、可控硅调速系统和机械手控制系统等方面得到应用。
结构和工作原理
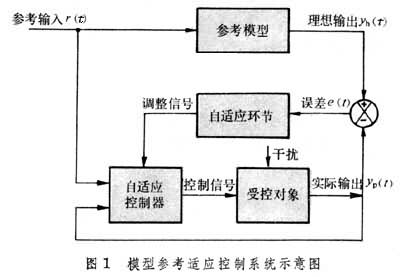 图1是说明模型参考适应控制系统组成结构和工作原理的示意图。其中,参考模型是一个具有固定结构和恒定参数的理想系统。在系统的参考输入作用下,模型的输出被规定为系统的受控对象所应具有的理想输出。由于外界干扰和内部的随机变化(参数漂移等),受控对象的实际输出与理想输出之间会出现误差e(t)。自适应环节根据误差信号,按照事先设计的调整策略(自适应律)向自适应控制器发出调整信号。控制器根据参考输入信号r(t)、受控对象实际输出的反馈信号和调整信号,对受控对象发出相应的控制信号,使误差e(t)减小以至消失,也就是使受控对象的输出接近于理想状态。
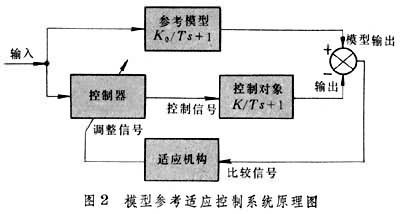
图1是说明模型参考适应控制系统组成结构和工作原理的示意图。其中,参考模型是一个具有固定结构和恒定参数的理想系统。在系统的参考输入作用下,模型的输出被规定为系统的受控对象所应具有的理想输出。由于外界干扰和内部的随机变化(参数漂移等),受控对象的实际输出与理想输出之间会出现误差e(t)。自适应环节根据误差信号,按照事先设计的调整策略(自适应律)向自适应控制器发出调整信号。控制器根据参考输入信号r(t)、受控对象实际输出的反馈信号和调整信号,对受控对象发出相应的控制信号,使误差e(t)减小以至消失,也就是使受控对象的输出接近于理想状态。设计问题 在模型参考适应控制系统中,自适应环节常是非线性的。如果设计不当,可能使整个系统失去稳定(见稳定性)。自适应律的合理设计是模型参考系统设计中的核心问题。为使系统稳定工作,可采用李雅普诺夫直接法(见李雅普诺夫稳定性理论)或波波夫超稳定性理论的概念和方法来设计自适应律。在图2 的系统中,受控对象是一个一阶系统,它的传递函数为K/(Ts+1)。其中K为未知参数,是需要自适应调整的增益,T是已知常数。参考模型的传递函数是K0/(Ts+1), K0是理想增益。对于这个系统,适应控制器是一个增益可调的放大器。它是按照李雅普诺夫方法来设计的,其中取李雅普诺夫函数V(e,x)=e2+λx2,λ≥0,x=K0- KS,KS是实际的系统增益。按照图2的结构组成的适应控制系统可稳定地工作,且可使输出偏差e(t)趋于零。
参考书目
Y.D.Landau, Adaptive Control: The Model Reference Approach, Marcel Dekker Inc., New York,1979.