四象限直流变换电路(卷名:电工)
four-quadrant D.C.converting circuit
输出电压和电流平均值的幅值和极性均可随控制信号而变的直流变换电路。它可运行于伏安特性的四个象限,生产中用以构成具有摩擦负载的可逆直流电动机调速系统(具有位能负载的可逆直流电动机调速系统可采用双象限直流变换电路)。该调速系统的传统形式是采用反并联相控整流电路。但该电路存在深控下电网侧功率因数很低和系统惯性过大的弱点,无法满足诸如伺服系统一类要求快速响应的场合。而直流变换电路由于容许在直流电源侧采用不控整流方式(见整流电路),因而网侧功率因数高且不随输出电压变化。由于直流变换电路采用斩波控制方式,斩波频率远高于电网频率。斩波频率的上限值视电路采用的器件而定,对普通晶闸管为500Hz;对可关断晶闸管为1kHz;对双极型功率晶体管为5kHz;对功率场效应晶体管为20kHz。这种系统惯性减小,快速响应性能好。四象限直流变换电路与双象限直流变换电路一样,也具有双向传输功率的能力。已发展了多种四象限电路,并可大致分为以下不同类型:
 其中,全桥电路指由4个导电臂组成的桥式变换电路,负载从桥的对角线引出;半桥电路则只包含两个导电臂,负载从直流电源中点O和导电臂中点A引出(图1a)。
其中,全桥电路指由4个导电臂组成的桥式变换电路,负载从桥的对角线引出;半桥电路则只包含两个导电臂,负载从直流电源中点O和导电臂中点A引出(图1a)。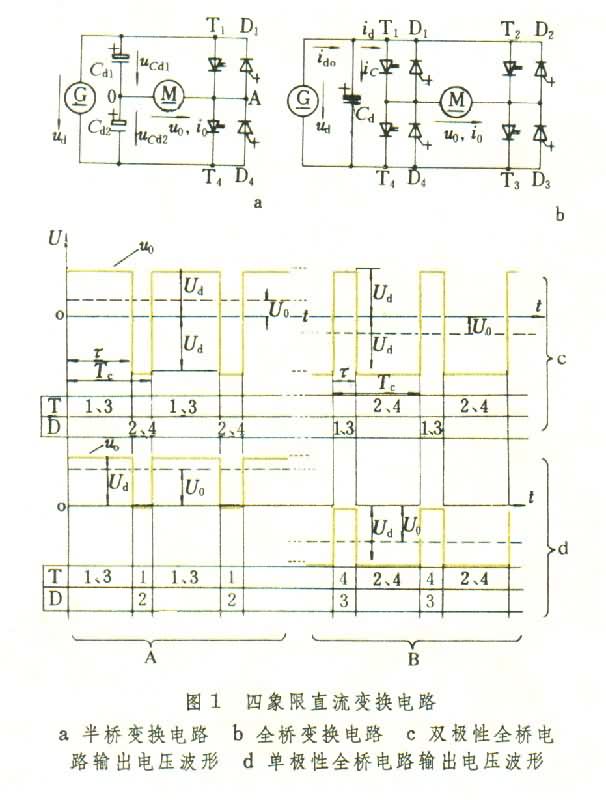 这两种电路均能四象限运行(在有源负载下)。半桥电路需用的可控元件少,但在相同直流输入电压下,其输出电压幅值仅为全桥电路的一半。
这两种电路均能四象限运行(在有源负载下)。半桥电路需用的可控元件少,但在相同直流输入电压下,其输出电压幅值仅为全桥电路的一半。半控型电路指由普通晶闸管组成的变换电路;全控型电路指由具有自关断能力的器件(如功率晶体管等)组成的电路。由于不需要附加换流电路,后者具有电路简单和工作频率高的优点,较易实现小型轻量化。
凡在一个斩波周期中输出电压极性有一次变化的电路称为双极性电路;相反则称为单极性电路。后者电流脉动小,但在轻载下会出现负载电流断续;前者电流脉动大,但电流无断续。
双极性全桥电路 电路如图1b所示。设桥中各可控元件的控制极脉冲依次为ug1~ug4,且其状态分布为ug1和ug3、ug2和ug4同相,ug1和ug4、ug2和ug3反相。各脉冲重复周期均为Tc,占空比D>0.5时电路输出电压u0波形如图1c中时区A所示。平均值u0>0,相应的电流I0>0,电路运行于第一象限,电机工作于正转电动状态。若D<0.5时,u0波形如图1c中时区B所示。U0<0,I0<0,电路工作于第三象限,电机以反转电动状态工作。对电路分析可知其直流增益Av为
 相应的可逆调速系统的开环机械特性可表示为
相应的可逆调速系统的开环机械特性可表示为 式中n为电动机转速,n0为电动机自然空载转速,M0为平均电磁转矩,Mk为堵转电磁转矩。
式中n为电动机转速,n0为电动机自然空载转速,M0为平均电磁转矩,Mk为堵转电磁转矩。由于电路结构上的原因,图1a所示的半桥电路,只能以双极性方式进行工作。
单极性全桥电路 电路结构仍如图1b,但随着可控元件控制极脉冲分布状态不同,全桥电路既可以双极性输出电压工作,也可以单极性工作。这时电路由T1和T4组成的导电臂称为方向臂。当电机正转时,有ug1>0,ug4=0,即T1常通而T4常断。相反,当电机反转时,有ug1=0,ug4>0,即T1常断而T4常通。由T2和T3组成的导电臂称为斩波臂,ug2和ug3在相位上互补,脉宽τ1和τ2(图1d随外加控制信号而变。于是,当T2(D2) 和T3(D3)轮番通断时,输出电压u0的波形如图ld所示。在时区A,有U0>0,I0>0,电路工作于第一象限,电机运行于正转电动状态。在时区B,有U0<0,I0<0,电路工作于第三象限,电机运行于反转电动状态。
推挽式电路 又称四象限丘克电路。其主电路结构如图2a所示。
 由图可见,该电路实际上是两只双象限丘克电路的推挽连接。由T1、T2组成的双象限丘克电路的出端电压为u01,由T3、T4组成的另一双象限丘克电路的出端电压为u02,推挽电路的输出电压u0是u01与u02之差(按图标正方向)。由电路分析知:
由图可见,该电路实际上是两只双象限丘克电路的推挽连接。由T1、T2组成的双象限丘克电路的出端电压为u01,由T3、T4组成的另一双象限丘克电路的出端电压为u02,推挽电路的输出电压u0是u01与u02之差(按图标正方向)。由电路分析知:
 式中D1=τ1/Tc,D01=τ2/Tc,若uga和ugb的波形如图2b所示,即D1>0.5,则Av>0,U0>0,I0>0,电路工作于第一象限。若D1<0.5,Av<0,U0<0,I0<0,电路工作于第三象限。
式中D1=τ1/Tc,D01=τ2/Tc,若uga和ugb的波形如图2b所示,即D1>0.5,则Av>0,U0>0,I0>0,电路工作于第一象限。若D1<0.5,Av<0,U0<0,I0<0,电路工作于第三象限。参考书目
姚纪文编:《自动控制元件及其线路》,国防工业出版社,北京,1980。
徐强:《脉宽调速系统》,上海科技文献出版社,上海,1983。