遥控(卷名:电子学与计算机)
remote control
综合应用自动控制、通信、计算技术对被控对象进行远距离控制和监测的技术。被控对象可以是固定的,如生产过程中的机器、阀门和开关等;也可以是活动的,如无人驾驶飞机、各种导弹、航弹、鱼雷、各种卫星和飞行器等。控制信号由控制站通过电缆传到被控端,称为有线遥控;控制信号通过无线电传到被控端,称为无线电遥控。有线遥控抗干扰性强,主要用于固定的被控对象;无线遥控主要用于活动的被控对象。为了传送多个控制信号,根据多路传输方式区分为时分遥控系统和频分遥控系统。时分遥控系统是按一定时间顺序传输不同的控制信号;频分遥控系统是把不同的控制信号用互不重叠的频率进行传输,在被控端用带通滤波器区分不同的控制信号。遥控系统按传输控制信号形式的不同又分为模拟遥控系统和数字遥控系统。模拟遥控系统是用模拟变换的方法将控制信号变换为适于信道传输的信号;数字遥控系统是用数字信号传输控制信号。模拟遥控系统简单、成本低,因而在要求不十分高的情况下仍然有很大的使用价值;数字遥控系统应用数字信号处理技术选取不同的优化方法,使控制系统始终处于最佳状态,从而提高了控制系统的可靠性和精确性,用途广泛。
发展简况 早在19世纪,人们就用遥控的方法点燃地雷。在20世纪初,为适应工业中电气事业、输油管道和化工等的迅速发展,简单的有线控制得到广泛的应用。1917年,美国陆军开始设计遥控飞行器(无人驾驶飞机)。到20年代末,遥控重型飞机的往返飞行距离已达1000公里。在同一时期,对无线电遥控船舰的研究也取得了进展。第二次世界大战末期,德国制成V-1和V-2导弹和无线电指令遥控防空导弹(“莱茵”号),使无线电遥控技术在武器控制中进入了实用阶段。从50年代起,美国和苏联都积极发展导弹武器,更推进了遥控技术的迅速发展。1957年,苏联发射了第一颗人造地球卫星,标志着无线电遥控技术进入了一个新阶段。1969年,美国“阿波罗”11号将人送上月球,实现了载人登月的往返飞行。1983年,美国“哥伦比亚”号航天飞机实验成功;“挑战者”号航天飞机进行了商业飞行。航天事业的进展把遥控技术推向了一个新的高度。
在中国的工业系统、武器系统和空间技术等领域中,遥控技术也得到了广泛的应用,并取得很大的进展。1970年中国成功地发射了第一颗人造地球卫星,以后又多次发射了不同功能的人造地球卫星,并使卫星顺利地返回地面。
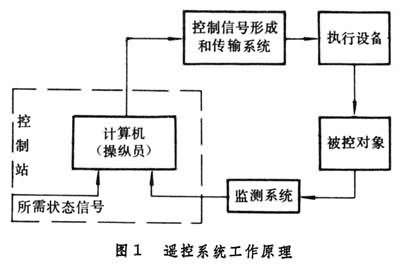
工作原理 遥控系统主要由控制站、控制信号的形成和传输系统、执行设备、被控对象,以及被控对象状态的监测系统组成。遥控系统的工作原理如图1。为了使控制站能了解关于被控对象所处的状态,一般由监测系统产生监测信号并传送给控制站的计算机(或操纵员)。监测方法可以由操纵人员直接观察(或用光学仪器),也可以用电视监测、雷达监测或遥测监测等各种方式。操纵人员根据监测信号迅速无误地了解被控对象所处的状态。被控对象的预定控制状态一般由计算机按一定程序给出,或者由操纵人员直接给出。在遥控过程中计算机(或操纵人员)对预定程序和监测信号进行比较,如果被控对象当前的状态与所要求的状态有差异,就由计算机(或操纵人员)发出控制指令。根据控制指令形成控制信号,并由控制信号传输系统传给执行设备,执行设备根据控制信号使被控对象产生相应的动作,使之达到所要求的状态。计算机是自动完成控制任务的,操作速度快,可以实现人无法胜任的工作。
在工业系统中,遥控技术主要用于集中控制、克服恶劣环境(如高温、辐射等)和提高操作准确性(如某些被控对象经常遇到障碍物,影响操纵人员的视线,动作难以准确自如)等情况。工业系统中的遥控技术经历了四个阶段。第一阶段是以继电器和电子管为主的有触点遥控装置。第二阶段是以磁性元件和晶体管为主的无触点遥控装置。第三阶段是以小规模和中规模集成电路为主的遥控装置。第四阶段是以大规模集成电路和微处理机为主的遥控装置。
工业系统中的遥控系统 工业用的遥控系统种类很多,主要有开环和闭环遥控系统、断续和连续遥控系统和集中控制系统。
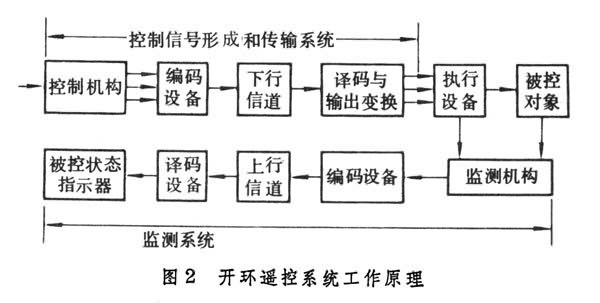
开环和闭环遥控系统 开环遥控系统(图 2)是指控制装置与被控对象之间没有反馈联系的控制系统,监测信号只作为对被控状态的一般了解,通常应用于对控制精度要求不高的控制系统。开环遥控系统的工作原理如图2所示。
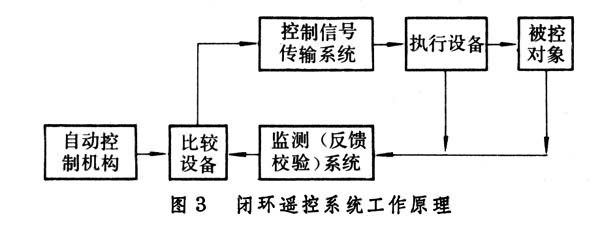
闭环遥控系统(图3)是指通过控制信号传输信道(一般称为下行信道)将控制信号传输到被控端,由被控站的接收系统对信号进行存储;同时通过监测信道(一般称为上行信道)向控制站发送反馈校验信号,在控制站的比较设备(计算机)中对控制信号与检验信号进行比较。如果正确无误,比较设备输出执行指令信号,执行设备工作;如果出现错误,比较设备将重发控制信号,这种系统能提高控制信号传输的可靠性。
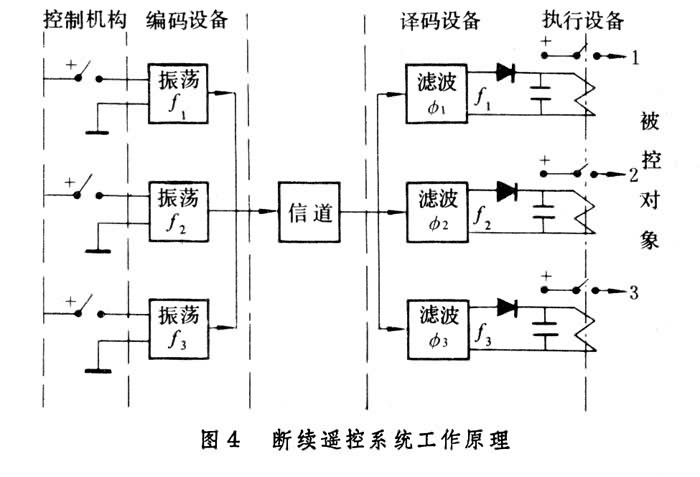
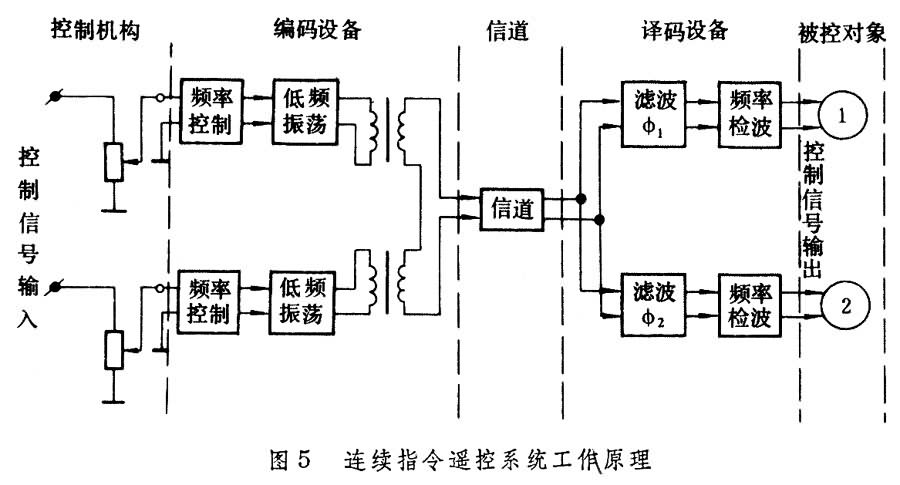
断续和连续遥控系统 断续遥控系统(图4)是指控制信号是断续的,只取有限个间断数值,其极端状态就是“断”、“通”指令。如果输入信号是连续的,须对连续信号进行采样使之离散化。断续遥控系统通常采用编码方式传输控制信号。指令控制机构是一组开关,当开关关闭时振荡器产生一个等幅信号,不同开关控制不同的振荡器,即所谓编码。经过信道传输,在被控端用滤波器进行分离,即所谓译码。分离后的等幅信号分别控制执行设备,使被控对象达到所要求的状态。连续指令遥控系统(图5)是指输入控制信号的数值是连续变化的,系统的输出信号也是连续的,如控制输油管的压力和流量(也称遥调)。
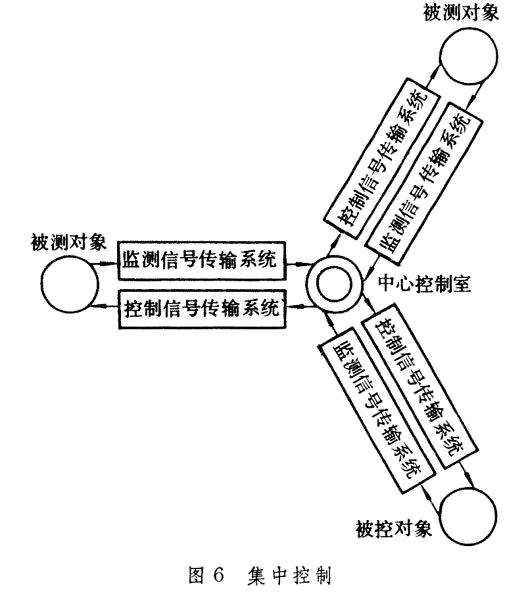
集中控制系统 集中由中心控制室对一些分散在各处的被控对象进行控制。这种系统有两个特点:结构形式是点与点之间的联系,即每处的被控对象都与中心控制室构成一个完整的遥控系统;遥控信号传输系统与监测系统(或遥测系统)是互不相关的两套设备。如果被控对象很多,而且分布在广大地区,这时往往将遥控、监测(或遥测)系统构成一个综合系统。集中控制传输指令数量大,中心控制室对各被控对象的控制不宜采用时分的方法,而是采用中心控制室发出询问信号,被控对象应答的方式。各被控对象用不同的编码信号(地址码)区分。在中心控制室由人工或者是自动方式发出询问指令,包括地址指令码和功能码。中心控制室和被控对象的分布方式因生产性质差异可能各不相同。
图6中,被控对象分布在一个平面上,在中心控制室有一个或若干个遥控装置,它们直接或通过交换装置接到一条或几条信道上。被控对象可能有一种或是几种。
微处理机的应用使遥控系统发生很大变化。传统的遥控装置被迅速取代。这种新的系统既不同于模拟遥控系统,也不同于数字(计算机)遥控系统,而是以微处理机为基础。这种系统通用性强、成本低、操作灵活,集中了模拟和数控的优点,克服了模拟系统的局限性和集中型计算机控制必须使用大、中型计算机的缺点。这种系统中心控制室用一台微处理机作为第一级控制,指挥第二级各微处理机工作。第二级微处理机分别完成通信、数据搜集和处理、 事故预测、 实时控制和事故处理等。被控对象的执行机构具有一定的智能,因而称为智能终端。由于终端使用微处理机,软件比较丰富,能以更高的水平完成信息处理、实时控制和局部故障处理等功能。
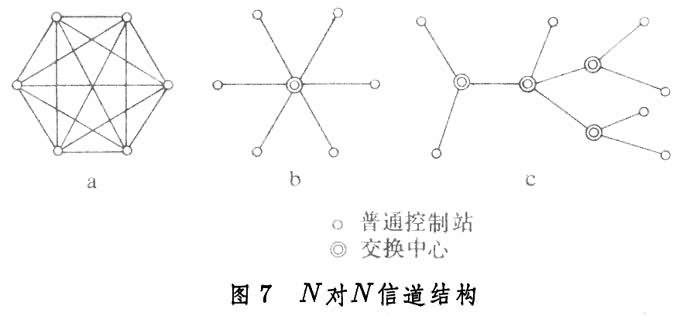
遥控系统的信道在中心控制室和被控对象之间传递信息。早期是1对1的通信系统,接着出现了1对N(若干个)的通信系统。随着数字通信和计算机网的发展,又出现N对N的通信网(图7)。这种通信系统不仅可以进行集中控制(1对N),而且可以形成N对N的复杂遥控系统。图7a为任意两控制站直接交换信息,需要信道数为C戩,若N=6,则C2=6×5/2=15。随着N 增大,信道数急剧增加。图7b为交换中心式,任意两站传输信息均靠交换中心转接,适用于辐射形分布的被控对象。图7c为树枝型信道网。
武器系统中的遥控系统 在工业系统中被控对象多半是固定的,而武器系统中的被控对象都是高速(几倍于音速)运动的。武器遥控系统是由设在地面、海面、飞机、军舰上的遥控站来测定目标(如飞机)和被控对象(如导弹)的相对位置并向被控对象发出控制指令,被控对象根据指令飞向目标。飞行弹道根据目标的运动情况随时改变,多数用无线电传输控制指令,少数用有线传输控制指令。遥控武器系统主要有7种形式。
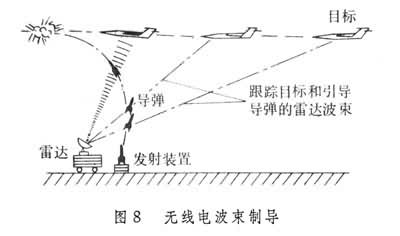
无线电波束制导 设在地面、飞机、军舰上的跟踪雷达在空间形成一个狭窄锥形旋转无线电波束。被跟踪的目标(敌机)恰好在旋转波束轴线上,导弹上装有接收系统,如导弹被射进波束,弹上接收系统就产生一个控制信号,控制导弹沿着波束轴线飞行。当波束跟踪目标时,导弹在空间随着波束一同移动,最终击中目标。这种制导方式也称驾束制导(图8)。
有线遥控制导系统 用于近距离(数公里)反坦克导弹。操纵人员操纵光学望远镜(或红外测角仪),使坦克始终处于望远镜的十字线中心。如果导弹偏离中心,操纵人员通过指令形成系统发出控制指令,用导线将控制指令传给导弹。控制指令使导弹的舵产生相应的动作而使导弹形成一定的气动力,纠正弹道。
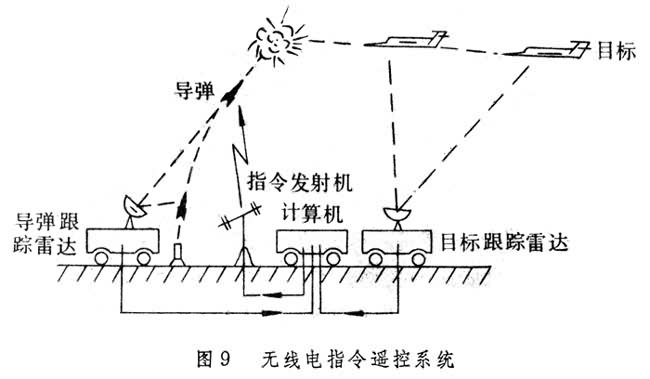
无线电指令遥控系统 一般由二部雷达(在一定条件下也可用一部雷达)分别测得目标(敌机)和导弹的空间坐标并输入到计算机。计算机根据导引方式(如三点法)计算出控制导弹的指令信号,通过指令发射机将指令信息传给导弹,控制导弹不断接近目标(图9)。
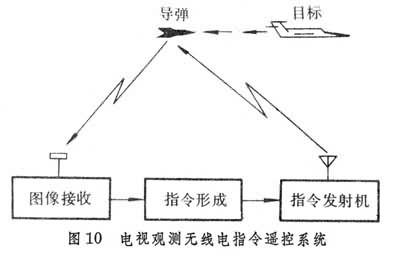
利用电视观测的无线电指令遥控系统 一般用于导弹制导系统。在弹头上装有电视摄像机,把目标及其周围背景的图像传送给控制站的电视接收机。操纵人员观察图像向导弹发出指令,使导弹始终对准目标(图10)。固体成像器件和红外成像技术的发展使这种遥控方法不受黑夜和烟幕的限制,但作用距离受到限制。
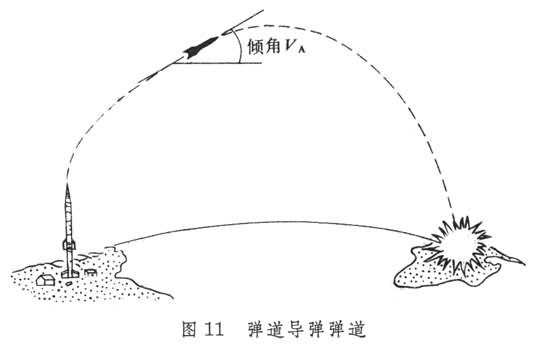
弹道导弹无线电遥控系统 弹道导弹的射程主要决定于导弹发动机关机时的速度、弹道倾角和关机点的坐标等弹道参数。但是,要使导弹在预定的关机点上有特定的速度和倾角,往往是不可能的;而关机点的坐标偏差要比导弹的速度和弹道倾角偏差对导弹射程的影响小得多。因此,弹道导弹的控制主要取决于如何观测导弹的速度和导弹的倾角。弹道导弹一般是垂直发射,发射后速度不断增加。当达到一定数值时,导弹在制导系统作用下按预定方案转变导弹的倾角,使其逐渐减小。当导弹的速度和倾角达到预定值时,制导系统发出关机指令,使发动机停止工作。此后,导弹按惯性飞行,到达预定地点(图11)。关机点的速度根据多普勒原理测得(图12)。从地面测量导弹主动段上的飞行速度,即由地面发射询问信号,导弹上的应答系统回答一个信号。导弹是以一定速度飞行的,因此,询问信号和应答信号之间产生多普勒频率。
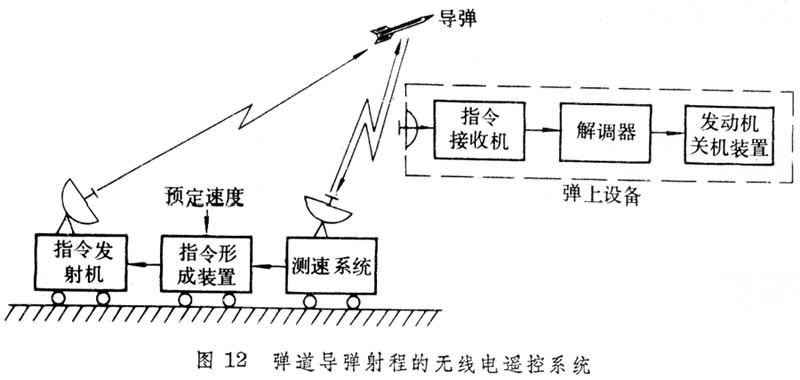
 式中VA为导弹对地面设备的相对速度;c为光速;f0为询问信号频率。
式中VA为导弹对地面设备的相对速度;c为光速;f0为询问信号频率。将测得的速度与预定的关机速度相比,如果二者相等就发出关机指令。
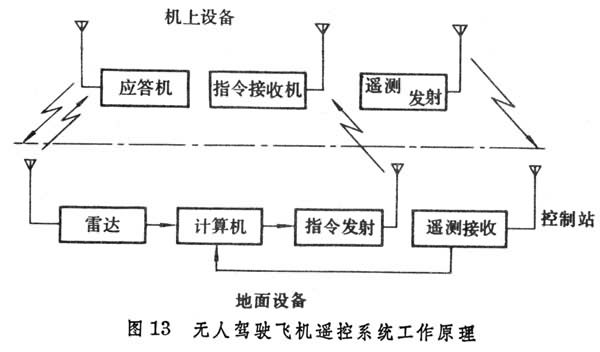
无人驾驶飞机和靶机遥控系统 为实现对无人驾驶飞机的控制,首先要知道被控对象在空间的位置并对被控对象进行识别。通常,由雷达和机上的应答系统配合进行定位和识别。雷达发出一串询问脉冲(密码),应答系统回答一串回答脉冲(密码)。其次还要知道飞机的实时姿态(如攻角、倾角)和机上设备的情况(如发动机的转数、电子设备工作是否正常等)。这些参数由机上遥测发射机发射,由地面遥测接收机接收。飞机位置和姿态数据在控制站中形成指令,通过指令发射机控制无人驾驶飞机(图13)。
宇宙飞行器的遥控系统 宇宙飞行器是在弹道导弹基础上发展起来的,一般分三个飞行阶段,分别对应三种制导方式,即初导、中导和末导。初导一般用无线电遥控指令。根据宇宙飞行器预定轨道参数,预先编好程序指令。飞行器发射后,地面制导站将指令信号发送给飞行器,使飞行器按预定轨道飞行。观测站不断观测飞行器的坐标和运动参数,并将这些数据输入到快速计算机中,计算出飞行器的实际飞行轨道参数,并与预定参数比较,形成指令修正飞行器的飞行偏差。
参考书目
王传善等编著:《运动技术》,上册,科学出版社,北京,1963。
日本電気工業会遠方監视制御技术专门委员会編,《遠方監视制御応用技术ハンドブック》,東京,1972。