潜水技术(卷名:大气科学 海洋科学 水文科学)
diving technology
供人员和机具潜入水下环境的专门装备和操作方法。是海洋开发利用以及打捞、救助、观测的重要辅助手段。
人类利用装备潜水历史悠久。早在公元前4世纪,亚里士多德曾记述过供采集海绵用的小型潜水钟,潜水钟带有驴皮制的气囊。中国明代崇祯十年(1637)出版的《天工开物》,记载了南海沿岸潜水采珠者用锡制弯管呼吸,还记载了治疗潜水病的方法。1819年英国人发明了通风式潜水装置;1866年法国人设计了自携式轻潜水装具的供气调节器,以后研制出自携式轻潜水装具。现代海洋潜水技术分为有人潜水和无人潜水两大类。
有人潜水 操作人员进入水下环境,所用的潜水装具需解决呼吸、承受水下压力和行动等问题。潜水员直接和海水接触,暴露在高压环境中,潜水结束后要按照不同下潜深度和逗留时间进行减压,称为直接潜水(又称高压潜水);潜水员在耐压容器内,不与海水直接接触,容器内保持正常大气压(一个大气压),称为间接潜水,又称大气压潜水或常压潜水。
直接潜水 潜水员暴露在水下高压环境中,每下潜10米水深约增加一个大气压,必须呼吸有相应压力的混合气体。潜水员在一定水深停留时,人体组织和血液内就会溶解一定数量混合气体中的中性气体,其溶解量随潜水深度和时间的增加而增加。当潜水员要回到常压环境时,须经过减压过程,使人体内的中性气体慢慢析出。析出过快会在人体组织和血液内形成气泡,使人得病,轻则瘫痪,重则死亡,称为减压病。减压时间随潜水的深度和时间增加而增加,例如,潜水员在200米水深停留20分钟,大约需要4小时的减压时间。应用普遍的是常规潜水,即潜入水下短时间作业后便减压回到水面的潜水,其供气装具有水面供气式(又称重潜水)和自携式(又称轻潜水)两种。
水面供气式潜水由水面通过软管向潜水员输送呼吸气体。随下潜深度增加,输送的呼吸气体成分不同,有氧气、压缩空气、氦-氧或氦-氮-氧混合气体。潜水深度超过60米,呼吸气体中需掺入比较昂贵的氦气,常采用喷射再生式氦-氧潜水装置,吸收呼吸气体中的二氧化碳等废气,补充其中消耗掉的氧气,然后继续循环使用。
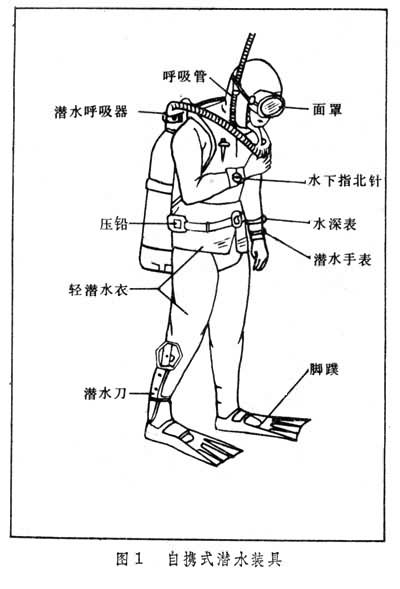
自携式潜水是指潜水员自己携带呼吸气体下潜。潜水员在水下能自由活动,作业范围广,并能和潜水钟式潜水器等配合使用,是现代潜水技术中的主要潜水方式(图1)。潜水员呼出的气体有3种处理方式:直接排出装具的为开放式;全部回收,经净化和补充氧气后继续使用的为密闭式;少量排出,大部分回收的为半密闭式。密闭式和半密闭式一般用于提供氦-氧或氧气的潜水装具。

1957年科学家发现,人在水下某一深度停留超过一定时间后(理论上是64小时,实际应用上是24小时),体内溶解的中性气体量将达到饱和。此时再延长停留时间并不需要增加减压时间,从而最大限度地减少减压次数和总减压时间,提高实际潜水工作效率。利用这一原理,潜水员首先被加压至某水深压力,然后再进行作业,称为饱和潜水。在饱和潜水的条件下,潜水员可以离开“水下加压(居住)舱”到相当于饱和深度的水中,并可以向下或向上到一定的深度进行作业,然后安全返回居住舱内。这种潜水称为饱和-巡回潜水(图2)。
间接潜水 利用抗压(盔甲)潜水服、潜水器等能够承受海水压力、内部保持常压的装具进行潜水。通常在作业后,潜水人员不需要进行减压。
抗压(盔甲)潜水服是一种用轻质合金制成、外形象人、四肢各关节可以活动和弯曲的硬式潜水装具。头盔上有透明观察窗,机械手随装具内人手的活动做相应的动作。这种潜水服备有供气系统和空气净化装置,到1980年时下潜深度已达 500米(图3)。

潜水器是一种自带推进动力和观察设备,既能在水面行驶,又能在水下独立进行工作的运载器。乘员可以在无水的常压舱内,利用观察窗或电视系统等直接向外观察水下情况或利用机械手作业。最初的潜水器大多用于水中和海底观察。从20世纪60年代开始,载人潜水器大多装备有机械手和多方向的推进器,不仅能够进行水下观察,还能进行各种水下作业。如“阿尔文”号潜水器,70年代发展了潜水员可以在水下出入的设闸式潜水器,把直接潜水和间接潜水结合起来。此外,还发展了能在水下和潜艇接口的深潜救生艇。目前载人潜水器的下潜深度大多在2000米以内,最深可达10000米以上,如“的里雅斯特”号潜水器。
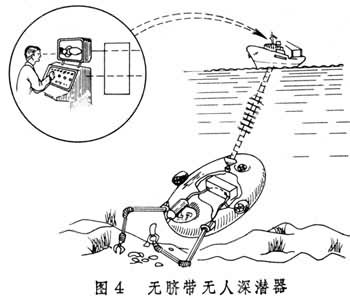
无人潜水 依靠遥控操作的无人潜水器在水下执行观察和作业任务,操作人员不直接进入水下。无人潜水器有多方向的推进器、水下姿态控制系统、水下照明、电视摄像系统和机械手等装置。按其能源和控制方式不同,可分为有缆和无缆两种。有缆无人潜水器于1953年研制成功,1975年开始用于海洋开发;70年代中期开始发展无脐带无人潜水器(图4)。目前有缆的无人潜水器占多数,其下潜深度已达7600米左右。70年代后期开始研制“海洋机器人”,遥控水下操纵器,它将能代替潜水人员进行更多的潜水作业。
参考书目
范仑立编:《潜水技术》,人民交通出版社,北京,1982。