地球重力场(卷名:固体地球物理学 测绘学 空间科学)
gravity field of the Earth
地球重力作用的空间。在地球重力场中,每一点所受的重力的大小和方向只同该点的位置有关。和其他力场(如磁场、电场)一样,地球重力场也有重力、重力线、重力位和等位面等要素。研究地球重力场,就是研究这些要素的物理特征和数学表达式,并以重力位理论为基础,将地球重力场分解成正常重力场和异常重力场两部分进行研究。研究地球重力场,在大地测量学中可用以推求平均地球椭球的形状,建立国家大地网和国家水准网;在空间科学中用以确定空间飞行器受地球引力场作用的轨道改正;在固体地球物理学中用以研究地球内部结构及资源分布。通常把这些研究地球重力场的内容称为重力学。
地球重力位理论 研究地球重力场的数学理论基础。
重力位的定义 地球重力位由地球质量引起的引力位和地球自转产生的离心力位两部分组成。
地球引力位V是地球质元dm对地球体积τ的积分(图1):
 式中G为引力常数。
式中G为引力常数。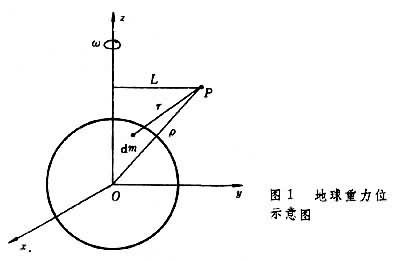
地球离心力位Q为:
 ,式中ω为地球自转角速度,L为点P至地球自转轴Z的垂直距离。
,式中ω为地球自转角速度,L为点P至地球自转轴Z的垂直距离。地球重力位W为:
W=V+Q。
重力位的特性 重力位是点P 的空间坐标的标量函数,它的梯度是重力,即:
g=墷W,重力位对某一方向的导数就等于重力在这个方向上的分量,即:
地球外部一点的引力位满足拉普拉斯方程:
 ,所以地球外部的引力位可以用球谐函数展开式来表达。
,所以地球外部的引力位可以用球谐函数展开式来表达。地球内部一点的引力位满足泊松方程:
墷2V=-4πGσ,式中σ 为地球密度。
重力位是坐标的函数。若在某曲面上重力位处处相等,则有:
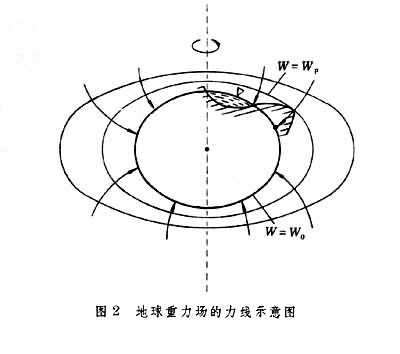
W(ρ,θ,λ)=C,式中 ρ、θ、λ 为球面坐标系内的坐标;C 为常数。此曲面称为重力等位面。在上式中如给定不同的常数C,则得到不同的重力等位面,所以在地球重力场中存在着一簇重力等位面。在任一个重力等位面上,每一点的法线(即垂线)就是重力方向,所以物体沿重力等位面运动,重力不做功。两相邻水准面之间的重力位差处处相等,这种位差就是一水准面上各点的重力值与其至相邻水准面的垂直距离的乘积。同一水准面上各点的重力值一般从赤道向两极增大,因而这些点至相邻水准面的垂直距离由赤道向两极逐渐减小,也就是相邻两水准面之间互不平行。重力等位面又称水准面,其中同理想的平均海面相重合、并延伸到整个地球大陆内部的水准面称为大地水准面。又由于地球内部质量分布不规则,致使任意两相邻水准面之间互不平行;又由于重力位是坐标的单值函数,所以两相邻水准面不能相交。水准面是一个封闭曲面。在地球重力场中的重力线是垂直穿过各重力等位面的空间曲线(图2)。重力场中某一点的重力方向就是这点重力线的切线方向。
地球正常重力场 由于地球内部质量分布的不规则性,致使地球重力场不是一个按简单规律变化的力场。但从总的趋势看,地球非常接近于一个旋转椭球,因此可将实际地球规则化,称为正常地球,同它相应的地球重力场称为正常重力场。它的重力位称为正常位U,重力称为正常重力γ0。在正常重力场中也有一簇正常位水准面,它们都是扁球面。某点的正常重力方向是正常重力场重力线的切线方向。
正常重力场的表示方法 一种是拉普拉斯方法。将地球引力位表示成球谐函数级数,取其头几个偶阶项作为正常位,并根据正常位求得正常重力,同它相应的正常地球是一个扁球,称为水准扁球。它的表面是一个正常位水准面。由于正常位是表示为级数形式的,所以随着选取的项数不同,扁球形状相应有所改变。
另一种选取正常重力场的方法是斯托克斯方法。先假设正常位水准面的形状是一个精确的旋转椭球,然后根据地球质量M和自转角速度 ω求它的外部重力位和重力。这样得到的正常位是封闭形式的。相应的正常地球就是表面为正常位水准面的旋转椭球,即水准椭球。
正常重力公式 按斯托克斯方法求得的水准椭球表面上封闭的正常重力公式为:
 ,式中α和b分别为椭球的长、短半轴。这个公式称为索密里安公式。将这个公式展开成级数,取到二级微小量(约1/3002,称为地球扁率平方级量),则在水准椭球表面上的正常重力公式为:
,式中α和b分别为椭球的长、短半轴。这个公式称为索密里安公式。将这个公式展开成级数,取到二级微小量(约1/3002,称为地球扁率平方级量),则在水准椭球表面上的正常重力公式为:γ0=γe(1+β sin2嗘 +β 1sin22嗘 ),式中
 ,是极上的正常重力γp与赤道上的正常重力γe之差同γe的比值,称为重力扁率;β 1为顾及到地球扁率平方级量的系数,
,是极上的正常重力γp与赤道上的正常重力γe之差同γe的比值,称为重力扁率;β 1为顾及到地球扁率平方级量的系数, 。在这种情况下水准椭球的重力扁率β 与几何扁率α 的关系为:
。在这种情况下水准椭球的重力扁率β 与几何扁率α 的关系为: ,式中
,式中 是地球赤道离心力和γe的比值。上式称为克莱洛定理。由此定理就可用重力数据推求水准椭球的几何扁率。
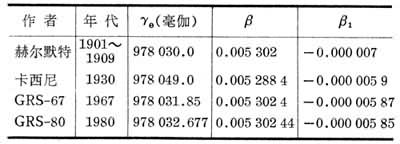
是地球赤道离心力和γe的比值。上式称为克莱洛定理。由此定理就可用重力数据推求水准椭球的几何扁率。正常重力公式中所包含的 3个常系数γe、β 和β 1取决于确定正常位所用的4个参数,即地心引力常数GM,地球自转角速度ω,动力形状因子J2(引力位中的二阶主球函数系数,是扁率的函数),以及水准椭球的长半轴α。惯用的常系数γe、β、β1值如表:
大地测量基本参考系统 为了使正常位尽可能接近重力位和建立全球大地坐标系,需要定义一个水准椭球(旋转椭球),使它的中心在地球质心上,短轴同地球自转轴重合,而且椭球面上的正常位等于大地水准面上的重力位,它的参数GM、ω、J2同实际地球的相等,参数ɑ的选择应使椭球面最密合于大地水准面,椭球的扁率可由J2求得。满足这些条件的水准椭球称为平均地球椭球。由于GM、ω、J2、ɑ这4个参数决定了椭球的物理和几何特性,所以这4个参数又称为大地测量基本参考系统。1979年12月,国际大地测量学和地球物理学联合会在澳大利亚堪培拉召开的第17届大会上建议“1980年大地测量基本参考系统”(GRS1980)为:长半轴ɑ=6378137米;动力形状因子J2=1.08263×10-3;自转角速度ω=7.292115×10-5弧度/秒;地心引力常数(包括大气)GM=3.986005×1014米3/秒2。
地球异常重力场 地球重力场的非规则部分称为异常重力场。地球重力场中任一点的重力位W和正常位U之差值称为扰动位T,即:
T=W-U。扰动位是由于地球的质量分布和形状同平均地球椭球的质量分布和形状不同而引起的。与扰动位相应的有重力异常和扰动重力。
应用地面重力资料,地球扰动位有两种求解方法:一种是利用大地水准面上的重力异常推求大地水准面外的扰动位,称斯托克斯理论;另一种是利用地面上的重力异常推求地面外的扰动位,称莫洛坚斯基理论(见地球形状)。但前提是在整个地球表面要有连续布满的重力和地形资料。由于地面重力资料的分布还很不均匀,高山地区和海洋面上资料较少,因此单纯采用地面重力资料研究地球重力场还不理想,必须同观测人造地球卫星的资料进行综合研究,才能获得更精确的地球重力场数据。
地球重力场模型 以球谐函数级数形式表示的地球引力位为:
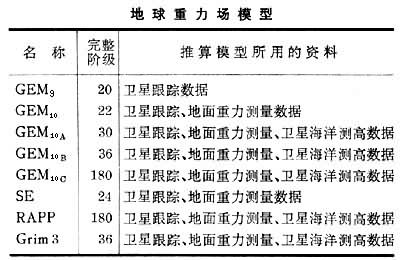
 式中ρ、θ、λ 分别为地球重力场中计算点的地心矢径、极距和经度;Cnm和Snm为引力位球谐函数系数,简称位系数。当m=0时称为带谐系数,当m=n时称为扇谐系数,当m厵n 时称为田谐系数(扇谐系数和田谐系数有时也统称为田谐系数),它们是引力位的主要参数;Pnm(cosθ)称为勒让德函数,n称为阶(或次),m称为级,当n在某一定值情况下,m由0变化到n,称为完整阶级。引力位球谐函数级数式中的第一项表示质量为 M的均质球体的引力位,求和符号中各项为地球形状和质量分布不同于均质球体而对球体引力位的增减部分。要细微地表达地球引力位,必须精确地推求出位系数Cnm和Snm。从概念上说,n应趋向无穷大,但实际上是办不到的。通常只能确定有限阶数的位系数,用以近似表示地球引力位。到1983年国际上已能推求出n=180的完整阶级的位系数,但公认n在36阶级内的位系数较可靠。
式中ρ、θ、λ 分别为地球重力场中计算点的地心矢径、极距和经度;Cnm和Snm为引力位球谐函数系数,简称位系数。当m=0时称为带谐系数,当m=n时称为扇谐系数,当m厵n 时称为田谐系数(扇谐系数和田谐系数有时也统称为田谐系数),它们是引力位的主要参数;Pnm(cosθ)称为勒让德函数,n称为阶(或次),m称为级,当n在某一定值情况下,m由0变化到n,称为完整阶级。引力位球谐函数级数式中的第一项表示质量为 M的均质球体的引力位,求和符号中各项为地球形状和质量分布不同于均质球体而对球体引力位的增减部分。要细微地表达地球引力位,必须精确地推求出位系数Cnm和Snm。从概念上说,n应趋向无穷大,但实际上是办不到的。通常只能确定有限阶数的位系数,用以近似表示地球引力位。到1983年国际上已能推求出n=180的完整阶级的位系数,但公认n在36阶级内的位系数较可靠。由一组位系数可以表达相应的地球重力场,称为地球重力场模型。由于推算位系数时所采用的资料类型和数量不同,所以有不同的地球重力场模型。表中所列是近年来发表的主要地球重力场模型。
地球重力场与地球内部构造 根据全球重力测量和卫星大地测量的结果,可以确定地球的总质量和地球的平均密度;配合天文测量结果,可以求出地球绕其自转轴的转动惯量;根据地面上大范围甚至全球范围的重力测量结果,可以研究地核-地幔边界的起伏,地幔-地壳边界的起伏,地幔中的热对流,地壳的均衡状态,以及地壳和地幔的横向不均匀性等。
重力勘探是重力学原理在勘探地下资源方面的应用。若某些地质构造或矿藏与其围岩在密度上有差异,则地面上的重力场在小范围内会发生局部变化。根据地面上局部重力场的变化规律,反演某些地质构造和矿藏的位置及其范围,是重力勘探的基本内容。近年来由于生产上的需要,重力测量精度的提高和电子计算机的采用,重力勘探获得了迅速的发展。
参考书目
W.A.海斯卡涅、H.莫里茨著,卢福康等译:《物理大地测量学》,测绘出版社,北京,1979。(W.A.Heiskanen and H.Moritz, Physical Geodesy, W.H. Freeman and Company,San Francisco,1967.)
W.A.Heiskanen,F.A.Vening Meinesz,The Earth and its Gravity Field,McGraw-Hill,New York,1958.