学习(卷名:自动控制与系统工程)
learning
人和计算机增长知识和提高技能的过程或技术。在人工智能研究中,一般指知识获取(显式知识和非显式知识)和理论形成(假说形成和归纳推理)。
研究“学习”的基本目的有两个方面:一是从认知建模角度出发(见认知模型),通过建立学习的计算机模型来研究人的学习机制;二是从工程技术角度出发,研究计算机如何具有学习能力,即机器学习问题。这两方面的研究互相关联,不可分割。机器学习,归根结蒂是人的学习问题,即人学习如何教会机器学习的问题。
发展简况 人工智能研究中对学习问题的研究大体经历了三个阶段。①早期的人工智能研究者(20世纪50年代)曾经研究自适应、自组织系统,试图模拟神经元的系统,典型的代表是A.罗森布卢埃特的感知机。这类从原来“一无所知”状态出发,通过反馈进行学习以改善其结构参数的电子装置并未获得预期结果。60年代初期,人工智能研究从学习问题转向问题求解和自然语言理解等方面,而自适应控制系统则沿着另外路线发展,成为现代控制理论的组成部分。②70年代对学习的研究又有回升,人们总结出一条重要经验:学习是一个极为复杂的过程,而任一学习系统如果从一无所知的起点出发是不可能学到高级知识的。这样便开始向两方面努力。理论方面主要通过简单问题深入研究人的学习机制,实践方面则开始研究将大量与问题领域有关专门知识通过学习程序(即知识获取程序)向知识型系统转移。③70年代后期,一方面继续研究学习机制,并从理论上提高认知科学或思维科学的水平;另一方面则研究在知识型系统中采用更复杂而有效的学习方式。
学习系统的简化模型
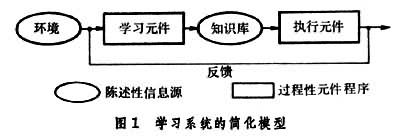 学习系统可通过一个由环境、学习元件、知识库、执行元件四个基本部分组成的简化模型来研究(图1)。其中环境提供信息,学习元件从环境信息获取知识并存储于知识库,由执行元件运用,运用的效果再反馈给学习元件。
学习系统可通过一个由环境、学习元件、知识库、执行元件四个基本部分组成的简化模型来研究(图1)。其中环境提供信息,学习元件从环境信息获取知识并存储于知识库,由执行元件运用,运用的效果再反馈给学习元件。基本学习方式 根据不同的环境条件和问题的性质,可归纳出例行手续学习方式、原则说明学习方式、典型示范学习方式和类比学习方式等几种基本的学习方式。
例行手续学习方式 例行手续学习方式的实质是信息检索。它适用于环境提供的信息和执行程序所需信息属于同一层次,因而无需建立假设的情况。只有在检索时间短于重新计算所需时间的情况下此种学习方式才有应用价值。
原则说明学习方式 原则说明学习方式的实质是将告知的抽象原则具体化。它适用于环境提供的信息涉及整个一类问题的较一般的高层次信息,而执行程序所需的信息则是属于某一特定问题所需的低层次信息的情况。例如MYCIN系统的知识获取程序TEIRESIAS就采用这种学习方式。
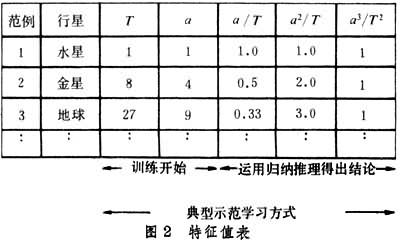
典型示范学习方式 典型示范学习方式的要点在于归纳推理。它适用于环境提供的信息只涉及特定问题的低层次信息,而执行程序所需的则是适用于整个一类问题的较一般的高层次信息的情况。示范的例子既可以是正面的,也可以是反面的。BACON程序是采用典型示范学习方式的例子。这个程序能通过归纳推理学习新的简单概念并重新发现若干经典的科学定律。 BACON程序的基本思想并不复杂,即反复检查所得数据并运用不同算子逐次建立新项,直到项等于常数为止。BACON程序的工作可以发现开普勒第三定律为例来说明。所谓开普勒第三定律指的是行星围绕太阳运动的公转周期的平方T2与它们的轨道半长径的立方a3成正比,即有a3/T2=k(常数)。向BACON提供的每个训练范例用一组特征值表示,BACON程序采用不同算子,依次生成a/T、a2/T和a3/T2的新项,一直到新项的值等于常数(图2)。至此BACON程序提出a3/T2=常数的假说,并收集更多数据来证明假说的可靠性。典型示范学习方式还在系统辨识、自适应控制和模式识别中得到应用(在模式识别中典型示范学习方式常被称为监督学习)。
类比学习方式 从类比推理中得到启示的学习方式。
参考书目
Paul R.Cohen and Edward A.Feigenbaum,ed.,The Handbook of Artificial Intelligence,Vol.Ⅲ, William Kaufmann, Inc., Los Altos, Calif.,1982.
R.S.Michalski,R.S.Carbonell,T.M.Mitchell,eds, Machine Learning, Tioga Publ. Co., New York, 1983.