雷达随动系统(卷名:电子学与计算机)
radar servomechanism
各种雷达都有许多随动系统。但是,通常所说的雷达随动系统是指各种跟踪雷达中的天线角坐标跟踪系统和距离跟踪系统。
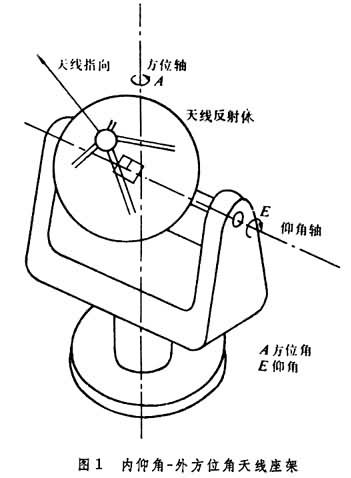
角坐标跟踪系统 常规的跟踪雷达通常使用内仰角-外方位角支架,以控制雷达天线在空间的指向(图1)。因此,天线角坐标跟踪系统也相应地由仰角跟踪系统和方位角跟踪系统两部分组成。两者的基本结构大体相同,只有内外框架因驱动条件的差别而有一些小的差别。图2为现代跟踪雷达的方位角跟踪系统的原理框图。
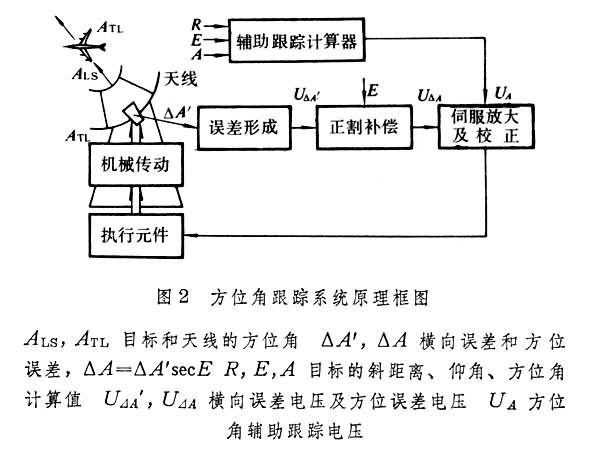
天线系统使雷达波束相对天线指向线形成一定的偏移组合(如使波束作圆锥扫描、顺序偏移,或几个偏移接收波束同时接收等),以便从目标回波中提取目标方向与雷达天线指向之间的角度误差信息,并分解成横向误差和纵向误差两部分,经雷达接收机放大。其中,纵向误差电压与天线仰角误差成正比。由于测量是在内框架上进行,而方位角是外框架的转角,因此横向误差电压要乘以天线仰角的正割值后才与方位误差成正比。这一乘法步骤通常称为正割补偿。角误差电压加在相应的伺服放大器上,经放大后启动执行元件,通过机械传动消除角误差,使天线指向与目标方向一致,完成天线对目标的角坐标跟踪。执行元件可以是伺服电动机,也可以是液压马达。伺服放大器通常具有高倍率的电压和功率放大作用,并包含天线转速、力矩等辅助反馈环路,与良好的传动结构设计配合可保证良好的驱动性能。伺服放大器的大功率末级,可以使用电机放大器、可控硅放大器、磁放大器或晶体管放大器。执行元件如为液压马达,则应有相应的电-液转换、液压放大器等部件。
对天线角坐标跟踪系统的主要性能要求,是使天线角位置准确而连续地跟踪快速变化的目标角位置。例如,精密跟踪雷达通常要以 0.1弧分量级的精度跟踪以几度每秒的角速度运动的目标;火控雷达要以弧分量级的精度跟踪以几十度每秒的角速度运动的目标。为达到这样的要求,必须有高精度的机械结构和良好的线路设计,以保证随动系统有快速响应目标运动的能力,也就是响应带宽要宽。但由于角坐标跟踪系统的误差信息是从雷达接收机接收的目标回波中提取的,运动目标的复杂表面不仅使反射回波振幅急剧起伏,而且使回波视在中心也在目标几何中心周围急剧跳动(角闪烁),加上接收机高倍率放大引入的接收机噪声的作用,使测得的误差信息中包含大量的干扰成分。若随动系统响应带宽过宽,天线将随目标回波视在中心的跳动和接收机的噪声作用而急剧摆动,反而不能稳定地对准目标几何中心位置,跟踪精度便会急剧下降。因此,雷达随动系统不能像一般随动系统那样单纯依靠加宽系统响应带宽的办法来提高对快速机动目标的跟踪能力。早期的跟踪雷达随动系统只能按目标运动参数(概率统计)和干扰的统计特性进行折衷设计。后来出现了按不同航路段用人工辅助控制带宽和利用目标斜距离自动调整系统响应带宽来提高跟踪精度的方法。60年代,随着目标机动性的提高,火控雷达中首先使用了再生反馈技术。70年代。随着数字技术的发展,跟踪雷达广泛采用了以卡尔曼滤波技术为主的现代滤波器辅助跟踪技术。雷达随动系统对更为复杂的航路机动的目标,也能达到良好的跟踪效果。图2中的辅助跟踪计算器,就是这种类型的辅助跟踪电压产生器。

距离跟踪系统 距离跟踪系统是典型的雷达随动系统。目标到雷达站的斜距离与目标回波相对发射脉冲的时间延迟成正比。跟踪雷达通常采用机电式距离跟踪系统(图3)进行连续跟踪式距离测量。在这种系统中,距离跟踪电动机经机械轴(距离轴)带动一套线性延时装置,产生一个延迟脉冲(距离波门)。这一脉冲相对发射脉冲的延迟时间与机械转角成正比,时间鉴别器比较目标回波和延迟脉冲的时间差(即距离轴标定距离和目标真实距离的误差),并变成距离误差电压,经伺服放大器控制距离跟踪电动机,移动距离波门对准目标回波。这样,距离轴的位置就同目标斜距离相对应。因此,距离跟踪系统也是通过目标回波完成系统误差测量的。回波信号幅度起伏、距离闪烁和接收机噪声,同样也给距离跟踪系统引入干扰。因而也要采用与角跟踪系统类似的手段,提高距离跟踪系统对距离上迅速变动的目标的精确跟踪能力。
与机电移相延时电路相比,数字式延迟电路具有快速、灵活、精确等特点而且经济。因此,在大多数现代跟踪雷达中,电子数字式距离跟踪电路已取代了机电式距离跟踪系统。