李雅普诺夫稳定性理论(卷名:自动控制与系统工程)
Liapunov stability theory
俄国数学家和力学家A.M.李雅普诺夫在1892年所创立的用于分析系统稳定性的理论。对于控制系统,稳定性是需要研究的一个基本问题。在研究线性定常系统时,已有许多判据如代数稳定判据、奈奎斯特稳定判据等可用来判定系统的稳定性。李雅普诺夫稳定性理论能同时适用于分析线性系统和非线性系统、定常系统和时变系统的稳定性,是更为一般的稳定性分析方法。李雅普诺夫稳定性理论主要指李雅普诺夫第二方法,又称李雅普诺夫直接法。李雅普诺夫第二方法可用于任意阶的系统,运用这一方法可以不必求解系统状态方程而直接判定稳定性。对非线性系统和时变系统,状态方程的求解常常是很困难的,因此李雅普诺夫第二方法就显示出很大的优越性。与第二方法相对应的是李雅普诺夫第一方法,又称李雅普诺夫间接法,它是通过研究非线性系统的线性化状态方程的特征值的分布来判定系统稳定性的。第一方法的影响远不及第二方法。在现代控制理论中,李雅普诺夫第二方法是研究稳定性的主要方法,既是研究控制系统理论问题的一种基本工具,又是分析具体控制系统稳定性的一种常用方法。李雅普诺夫第二方法的局限性,是运用时需要有相当的经验和技巧,而且所给出的结论只是系统为稳定或不稳定的充分条件;但在用其他方法无效时,这种方法还能解决一些非线性系统的稳定性问题。
发展概况 从19世纪末以来,李雅普诺夫稳定性理论一直指导着关于稳定性的研究和应用。不少学者遵循李雅普诺夫所开辟的研究路线对第二方法作了一些新的发展。一方面,李雅普诺夫第二方法被推广到研究一般系统的稳定性。例如,1957年,В.И.祖博夫将李雅普诺夫方法用于研究度量空间中不变集合的稳定性。随后,J.P.拉萨尔等又对各种形式抽象系统的李雅普诺夫稳定性进行了研究。在这些研究中,系统的描述不限于微分方程或差分方程,运动平衡状态已采用不变集合表示,李雅普诺夫函数是在更一般意义下定义的。1967年,D.布肖对表征在集合与映射水平上的系统建立了李雅普诺夫第二方法。这时,李雅普诺夫函数已不在实数域上取值,而是在有序定义的半格上取值。另一方面,李雅普诺夫第二方法被用于研究大系统或多级系统的稳定性。此时,李雅普诺夫函数被推广为向量形式,称为向量李雅普诺夫函数。用这种方法可建立大系统稳定性的充分条件。
系统的受扰运动和平衡状态 稳定性问题的实质是考察系统由初始状态扰动引起的受扰运动能否趋近或返回到原平衡状态。用x0表示初始状态扰动,则受扰运动就是系统状态方程 凧=f(x,t)在初始时刻 t0时受到状态扰动x(t0)=x0后的解。其中x是n维状态向量,
 f(x,t)是以x和时间t为自变量的一个n维非线性向量函数。在满足一定条件时,这个状态方程有惟一解。系统的受扰运动是随时间 t而变化的,而其变化又与初始扰动 x0和作用时刻t0有直接的关系,数学上表示为依赖于这些量的一个向量函数,记为φ(t; x0,t0)。在以状态x的分量为坐标轴构成的状态空间中,随着时间t增加,受扰运动φ(t; x0,t0)表现为从 x0点出发的一条轨线。平衡状态是系统处于相对静止时的运动状态,用xe表示,其特点是对时间的导数恒等于零,可由求解函数方程f(xe,t)=0来定出。为便于表示和分析,常把平衡点xe规定为状态空间的原点,这可通过适当的坐标变换来实现。因此李雅普诺夫第二方法可归结为研究受扰运动轨线相对于状态空间原点的稳定性。
f(x,t)是以x和时间t为自变量的一个n维非线性向量函数。在满足一定条件时,这个状态方程有惟一解。系统的受扰运动是随时间 t而变化的,而其变化又与初始扰动 x0和作用时刻t0有直接的关系,数学上表示为依赖于这些量的一个向量函数,记为φ(t; x0,t0)。在以状态x的分量为坐标轴构成的状态空间中,随着时间t增加,受扰运动φ(t; x0,t0)表现为从 x0点出发的一条轨线。平衡状态是系统处于相对静止时的运动状态,用xe表示,其特点是对时间的导数恒等于零,可由求解函数方程f(xe,t)=0来定出。为便于表示和分析,常把平衡点xe规定为状态空间的原点,这可通过适当的坐标变换来实现。因此李雅普诺夫第二方法可归结为研究受扰运动轨线相对于状态空间原点的稳定性。李雅普诺夫意义下的稳定性 指对系统平衡状态为稳定或不稳定所规定的标准。主要涉及稳定、渐近稳定、大范围渐近稳定和不稳定。
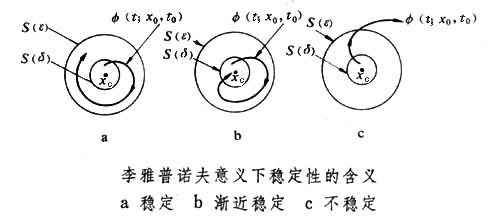
①稳定 用 S(ε)表示状态空间中以原点为球心以ε为半径的一个球域,S(δ)表示另一个半径为 δ的球域。如果对于任意选定的每一个域S(ε),必然存在相应的一个域S(δ),其中δ<ε,使得在所考虑的整个时间区间内,从域 S(δ)内任一点 x0出发的受扰运动φ(t;x0,t0)的轨线都不越出域S(ε),那么称原点平衡状态 xe=0是李雅普诺夫意义下稳定的。这个定义可用数学语言叙述如下:如果对于任意给定的实数ε>0,都存在实数δ(ε,t0),满足不等式ε>δ(ε,t0)>0,它使从满足不等式

 的任一初态 x0出发的运动对于t≥t0满足不等式
的任一初态 x0出发的运动对于t≥t0满足不等式 则称状态空间的原点xe=0是李雅普诺夫意义下稳定的。其中,δ的大小不仅与给定的ε值有关,而且也与初始时刻t0有关。当定义中δ值的选取和初始时刻 t0无关时,称xe=0是一致稳定的。对定常系统,稳定等同于一致稳定。
则称状态空间的原点xe=0是李雅普诺夫意义下稳定的。其中,δ的大小不仅与给定的ε值有关,而且也与初始时刻t0有关。当定义中δ值的选取和初始时刻 t0无关时,称xe=0是一致稳定的。对定常系统,稳定等同于一致稳定。②渐近稳定 如果原点平衡状态是李雅普诺夫意义下稳定的,而且在时间t趋于无穷大时受扰运动φ(t;x0,t0)收敛到平衡状态xe=0,则称系统平衡状态是渐近稳定的。从实用观点看,渐近稳定比稳定重要。在应用中,确定渐近稳定性的最大范围是十分必要的,它能决定受扰运动为渐近稳定前提下初始扰动x0的最大允许范围。
③大范围渐近稳定 又称全局渐近稳定,是指当状态空间中的一切非零点取为初始扰动x0时,受扰运动φ(t;x0,t0)都为渐近稳定的一种情况。在控制工程中总是希望系统具有大范围渐近稳定的特性。系统为全局渐近稳定的必要条件是它在状态空间中只有一个平衡状态。
④不稳定 如果存在一个选定的球域S(ε),不管把域S(δ)的半径取得多么小,在S(δ)内总存在至少一个点x0,使由这一状态出发的受扰运动轨线脱离域 S(ε),则称系统原点平衡状态xe=0是不稳定的。
当状态空间为二维平面时,系统平衡状态xe的稳定、渐近稳定、不稳定的含义,可用图表示。
李雅普诺夫函数 李雅普诺夫第二方法是在推广振动系统稳定性基础上建立的。根据力学原理,如果一个振动系统的总能量随时间连续减小,直到平衡状态为止,那么振动系统就是稳定的。李雅普诺夫把这一原理推广到可用状态方程描述的一般系统,并且引入一个虚构的能量函数,称为李雅普诺夫函数。李雅普诺夫函数具有能量函数的基本特征,也是和系统运动有关的一个标量函数,但其含义比能量更为一般,常用 V(x,t)来表示。当李雅普诺夫函数仅与状态有关而与时间 t无直接关系时,可用V(x)表示。在李雅普诺夫第二方法中,通过对V(x,t)及其导数
 的符号特征的分析,可判断平衡状态为稳定、渐近稳定或不稳定。这样做比通过求状态方程的解来判断容易得多。对于简单非线性系统,李雅普诺夫函数常可取为x的一个二次型函数V(x)=xTQx,其中xT为x的转置,Q为正定对称矩阵。不过,对于复杂的系统,寻找李雅普诺夫函数可能十分困难。
的符号特征的分析,可判断平衡状态为稳定、渐近稳定或不稳定。这样做比通过求状态方程的解来判断容易得多。对于简单非线性系统,李雅普诺夫函数常可取为x的一个二次型函数V(x)=xTQx,其中xT为x的转置,Q为正定对称矩阵。不过,对于复杂的系统,寻找李雅普诺夫函数可能十分困难。李雅普诺夫稳定性定理 李雅普诺夫第二方法有三个主要定理。
①一致渐近稳定定理 对于由状态方程
 描述的系统,如果存在一个李雅普诺夫函数V(x,t),它满足条件:V(x,t)为正定且有无穷小上界,并且
描述的系统,如果存在一个李雅普诺夫函数V(x,t),它满足条件:V(x,t)为正定且有无穷小上界,并且 为负定,那么原点平衡状态xe=0是一致渐近稳定的。在很多情况下常常不易找到满足为负定条件的李雅普诺夫函数。对于这种情况,定理中为负定的条件,可等价地放宽:为半负定,且沿任一受扰运动轨线
为负定,那么原点平衡状态xe=0是一致渐近稳定的。在很多情况下常常不易找到满足为负定条件的李雅普诺夫函数。对于这种情况,定理中为负定的条件,可等价地放宽:为半负定,且沿任一受扰运动轨线 不恒为零。
不恒为零。②大范围一致渐近稳定定理 如果系统的平衡状态xe=0为一致渐近稳定,并且李雅普诺夫函数V(x,t)随
 而趋向无穷大,其中x1,…,xn为状态x的分量,那么原点平衡状态为大范围一致渐近稳定。
而趋向无穷大,其中x1,…,xn为状态x的分量,那么原点平衡状态为大范围一致渐近稳定。③不稳定定理 如果对xe=0,可从状态方程
 描述的系统找到一个标量函数W(x,t),使成立W(0,t)=0,且在满足W(x,t)≥0的区域内
描述的系统找到一个标量函数W(x,t),使成立W(0,t)=0,且在满足W(x,t)≥0的区域内 为正定,那么原点平衡状态是不稳定的。
为正定,那么原点平衡状态是不稳定的。李雅普诺夫第二方法定理的局限性是它们只给出了判断平衡状态稳定性和不稳定性的充分条件。当找不到一个李雅普诺夫函数可用来证明平衡状态是渐近稳定或不稳定时,并不能对系统稳定性的情况作出结论。
线性定常系统的李雅普诺夫稳定判据 对于由状态方程
 描述的连续线性定常系统,其中A是n×n常量矩阵,则原点平衡状态xe=0是大范围渐近稳定的充分必要条件为:对给定任一正定实对称矩阵Q,李雅普诺夫方程PA+ATP=-Q有惟一正定实对称矩阵解P。其中AT是A的转置矩阵,而且V(x)=xTPx是系统的一个李雅普诺夫函数。对于由状态方程x(k+1)=Gx(k)所描述的离散线性定常系统,其中G为n×n常量矩阵,k=0,1,…,那么其原点平衡状态是大范围渐近稳定的充分必要条件为:对给定任一正定实对称矩阵Q,离散李雅普诺夫方程GTPG-P=-Q有惟一正定实对称矩阵解P。在最优控制理论中,李雅普诺夫稳定判据是分析线性调节器稳定性的基本方法。在将判据用于分析具体问题时,常采用数值方法求解李雅普诺夫方程,并已配有专门的算法程序。
描述的连续线性定常系统,其中A是n×n常量矩阵,则原点平衡状态xe=0是大范围渐近稳定的充分必要条件为:对给定任一正定实对称矩阵Q,李雅普诺夫方程PA+ATP=-Q有惟一正定实对称矩阵解P。其中AT是A的转置矩阵,而且V(x)=xTPx是系统的一个李雅普诺夫函数。对于由状态方程x(k+1)=Gx(k)所描述的离散线性定常系统,其中G为n×n常量矩阵,k=0,1,…,那么其原点平衡状态是大范围渐近稳定的充分必要条件为:对给定任一正定实对称矩阵Q,离散李雅普诺夫方程GTPG-P=-Q有惟一正定实对称矩阵解P。在最优控制理论中,李雅普诺夫稳定判据是分析线性调节器稳定性的基本方法。在将判据用于分析具体问题时,常采用数值方法求解李雅普诺夫方程,并已配有专门的算法程序。李雅普诺夫第二方法用于估计瞬态响应快速性 对于用李雅普诺夫第二方法判断为渐近稳定的系统,由李雅普诺夫函数还可得到系统瞬态响应快速性的一种估计。
 表示正定的V(x,t)和负定的
表示正定的V(x,t)和负定的 的比值,必为正值。再取ηmin表示η的最小值,那么由关系式V(x,t)≤V(x0,t0)exp(-ηmin(t-t0))可得出李雅普诺夫函数衰减快慢的一种估计,其中V(x0,t0)为初始时刻t0和初始状态x0时的函数值。V(x,t)可展开为以x2项为首项的一级数,所以ηmin也可作为估计瞬态响应衰减快慢的一个指标,较小的ηmin值对应于较快的瞬态响应。对非线性系统,只有当V(x,t)形式比较简单时,ηmin的值才可容易确定。对线性定常系统,ηmin等于矩阵QP-1的特征值,一般很容易决定,其中P-1是李雅普诺夫方程解矩阵P 的逆矩阵。
的比值,必为正值。再取ηmin表示η的最小值,那么由关系式V(x,t)≤V(x0,t0)exp(-ηmin(t-t0))可得出李雅普诺夫函数衰减快慢的一种估计,其中V(x0,t0)为初始时刻t0和初始状态x0时的函数值。V(x,t)可展开为以x2项为首项的一级数,所以ηmin也可作为估计瞬态响应衰减快慢的一个指标,较小的ηmin值对应于较快的瞬态响应。对非线性系统,只有当V(x,t)形式比较简单时,ηmin的值才可容易确定。对线性定常系统,ηmin等于矩阵QP-1的特征值,一般很容易决定,其中P-1是李雅普诺夫方程解矩阵P 的逆矩阵。参考书目
N.Rouche,P.Habets,M.Laloy, Stability Theory by Liapunov's Direct Method, Springer-Verlag, New York, 1979.