两足步行机器人(卷名:自动控制与系统工程)
biped walking robot
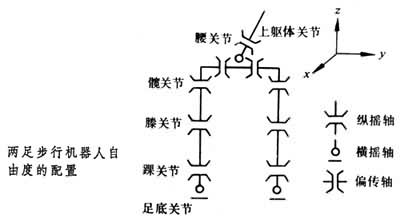 模拟人类用两条腿走路的机器人。两足步行机器人适于在凸凹不平或有障碍的地面行走作业,比一般移动机器人灵活性强,机动性好。1972年,日本早稻田大学研制出第一台功能较全的两足步行机器人。美国、南斯拉夫等学者也研制出各种两足走行机器人模型。两足步行模型是一个变结构机构,单脚支撑为开式链,双脚支撑为闭式链。支撑点的固定靠摩擦力来保证,质量分布和重量大小都直接影响静态和动态的稳定性。为保证行走过程中姿态的稳定性,对行走步态应加严格的约束。图中示出了具有11个动力关节的两足步行模型的自由度分配。这些关节以旋转轴的方向分为纵摇轴、横摇轴和偏航轴。纵摇轴实现前进方向的重心移动,横摇轴实现左右方向的重心摆动,偏航轴转换方向。在行走过程中,通过纵摇轴的髋关节、膝关节和踝关节的协调动作,在前进方向上移动重心;通过上驱体关节使上身左倾或右倾,移动上身塔载调节重心;通过偏航轴的腰关节转换方向。关节的驱动能源主要有气压、液压和电动三种。气压式重量轻、安全便宜,但因空气的可缩性,在变负载情况下,稳定性差。液压式输出功率大、快速性好,但需配备动力组件。例如,日本早稻田大学加藤一郎教授研制的WD-10RD,是具有12个自由度的液压驱动机器人。电动式结构简单、控制容易。但功率密度低、价格较高。
模拟人类用两条腿走路的机器人。两足步行机器人适于在凸凹不平或有障碍的地面行走作业,比一般移动机器人灵活性强,机动性好。1972年,日本早稻田大学研制出第一台功能较全的两足步行机器人。美国、南斯拉夫等学者也研制出各种两足走行机器人模型。两足步行模型是一个变结构机构,单脚支撑为开式链,双脚支撑为闭式链。支撑点的固定靠摩擦力来保证,质量分布和重量大小都直接影响静态和动态的稳定性。为保证行走过程中姿态的稳定性,对行走步态应加严格的约束。图中示出了具有11个动力关节的两足步行模型的自由度分配。这些关节以旋转轴的方向分为纵摇轴、横摇轴和偏航轴。纵摇轴实现前进方向的重心移动,横摇轴实现左右方向的重心摆动,偏航轴转换方向。在行走过程中,通过纵摇轴的髋关节、膝关节和踝关节的协调动作,在前进方向上移动重心;通过上驱体关节使上身左倾或右倾,移动上身塔载调节重心;通过偏航轴的腰关节转换方向。关节的驱动能源主要有气压、液压和电动三种。气压式重量轻、安全便宜,但因空气的可缩性,在变负载情况下,稳定性差。液压式输出功率大、快速性好,但需配备动力组件。例如,日本早稻田大学加藤一郎教授研制的WD-10RD,是具有12个自由度的液压驱动机器人。电动式结构简单、控制容易。但功率密度低、价格较高。两足走行的行走方式有静态步行、准动态步行和动态步行三种。①静态步行:两足步行机器人靠地面反力和摩擦力来支撑,绕此合力作用点力矩为零的点称为零力矩点(ZMP)。在行走过程中,始终保持ZMP在脚的支撑面或支撑区域内。②准动态步行:把维持机器人的行走分为单脚支撑期和双脚支撑期,在单脚支撑期采用静态步行控制方式,将双脚支撑期视为倒立摆,控制重心由后脚支撑面滑到前脚支撑面。③动态步行:这是一种类人型的行走方式。在行走过程中,将整个驱体视为多连杆倒立摆,控制其姿态稳定性,并巧妙利用重力、蹬脚和摆动推动重心前移,实现两足步行。动态步行涉及机构控制和能源等难题,目前仍处于研究阶段,两足步行机器人可用于宇宙探测、排险及军事等方面。